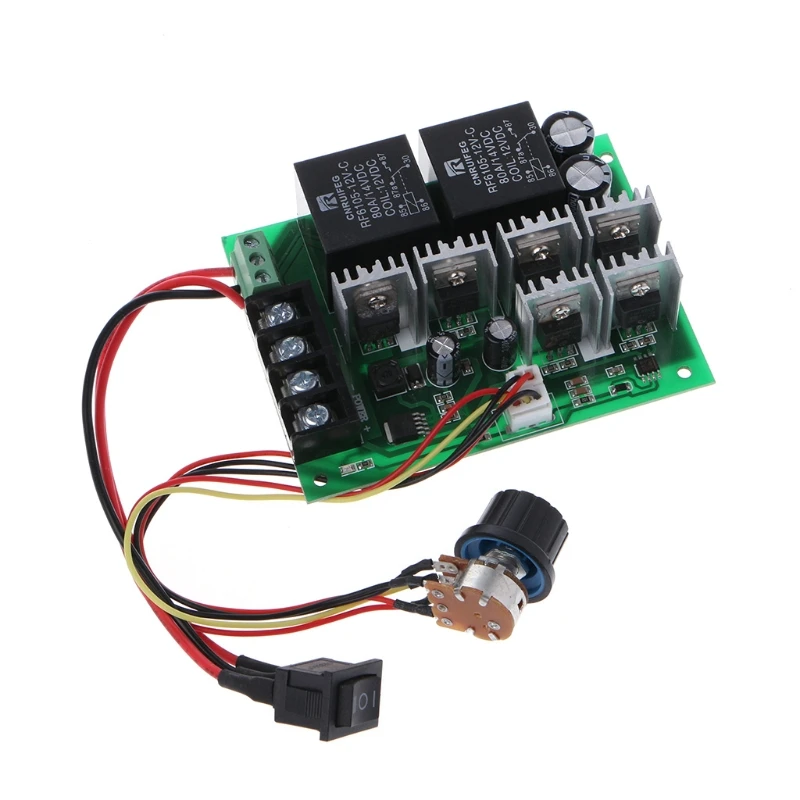
ШИМ регулятор оборотов двигателя 10-60В, 20А
ШИМ регулятор оборотов коллекторного двигателя постоянного тока DC 10-60В 40А с выносным регулятором.
ШИМ регулятор мощности имеет самое широкую область применения. Это регулятор хода двигателей, диммер для светодиодов и светодиодных лент.
Регулятор напряжения постоянного тока изменяет значение выходного напряжения в диапазоне от 10 вольт до 60 Вольт с максимальной нагрузкой до 20 Ампер и мощностью до 1200 Ватт.
Профессиональная версия ШИМ-контроллера, адаптированная для непрерывной работы.
Применение:
- плавное регулирование частоты вращения электродвигателей (вентиляторы, вакуумные масляные насосы, лопасти, двигатели стеклоочистителей и т. д.)
- регулировка яркости свечения галогеновых ламп 12В/24В, или ламп накаливания 12В/24В/36В/48В
- регулировка силы света (диммер) (светодиоды и светодиодные ленты без мерцания)
- регулирование мощности нагревателей, резистивных проволочных нагревателей и других резистивных элементов
Управление скоростью двигателя осуществляется с помощью выносного регулировочного резистора на 10 кОм с ручкой.
- Используется для точной регулировки скорости.
- Высокая эффективность, высокий крутящий момент, низкий нагрев.
- С защитой от обратной полярности, с высокой защитой по току.
- Предназначен для управления нагрузкой до 20 А. Рекомендуемая длительная нагрузка 10 A, 450 Вт.
- Внимание! При использование модуля для регулировки на нагрузках близких к 20 А необходимо дополнительное охлаждение.
- Потенциометр управления скважностью импульсов позволяет производить регулировку мощности от нуля до максимального значения
Характеристики
Напряжение питания: 10 – 60 В постоянного тока
Максимальный ток: 20 А
Непрерывный ток: 18 А
Максимальная мощность: 1200 Вт
Диапазон управления скоростью двигателя: от 0 до 100%
Частота ШИМ: 25 кГц
Размеры: 77 х 45 х 28 мм
Схема подключения:
На плате регулятора имеется 4 винтовых клеммы для подключения двигателя и питания.
Клеммы Power + и Power- подключаем к источнику питания соответственно + и — (например, к аккумулятору)
Клеммы Motor+ и Motor- подключаем к электродвигателю постоянного тока в соответствующей полярности (при смене полярности, двигатель будет вращаться в другую сторону).
Motor Control: ШИМ-регулятор
Управление двигателем постоянного тока проще всего организовать с помощью ШИМ — регулятора. ШИМ — это широтно-импульсная модуляция, в английском языке это называется PWM — Pulse Width Modulation. Теорию я подробно объяснять не буду, информации полно в интернете. Своими словами — если у нас есть двигатель постоянного тока на 12 вольт — то мы можем регулировать обороты двигателя изменяя напряжение питания. Изменяя напряжение питания от нуля до 12 вольт будут изменятся обороты двигателя от нуля до максимальных. В случае с ШИМ-регулятором мы будем изменять скважность импульсов от 0 до 100 % и это будет эквивалентно изменению напряжения питания двигателя и соответственно будут изменятся обороты двигателя.
Рассмотрим первый ШИМ-регулятор на 5 ампер. Есть такая самая любимая микросхема всех радиолюбителей — это таймер NE555 ( или советский аналог КР1006ВИ). Вот на этой микросхеме и собран ШИМ-регулятор. Кроме таймера здесь я использую стабилизатор на 9 вольт LM7809 , мощный полевой транзистор с N-каналом IRF540, сдвоенный диод Шоттки, а также другие мелкие детали. Схема по которой собран этот регулятор всем известна и очень популярна.
Печатку этой платы можно скачать — ШИМ 5А
В более мощном исполнении я применяю просто параллельное включение нескольких полевых транзисторов IRF540 и более мощный сдвоенный диод Шоттки. В остальном всё аналогично.
Печатку этой платы можно скачать — ШИМ 10А Подключение ШИМ-регулятора очень простое. Вы видите 4 клеммы — две клеммы для подачи питания и , и две клеммы для подключения мотора и .
Сделал ещё ШИМ-регулятор с защитой по току. Для этих целей использовал распространенный операционный усилитель LM358 и два оптрона PC817.
ШИМ-регуляторы все работоспособны , проверил их работу с помощью двигателя от шуруповёрта.
Снял видео —
Разработал нормальные платы по этим схемам и снял 2 новых видео.
Первое видео —
Второе видео —
Ссылки для заказа таких плат на сайте pcbway
| Определить языкАзербайджанскийАлбанскийАмхарскийАнглийскийАрабскийАрмянскийАфрикаансБаскскийБелорусскийБенгальскийБирманскийБолгарскийБоснийскийВаллийскийВенгерскийВьетнамскийГавайскийГаитянскийГалисийскийГолландскийГреческийГрузинскийГуджаратиДатскийЗулуИвритИгбоИдишИндонезийскийИрландскийИсландскийИспанскийИтальянскийЙорубаКазахскийКаннадаКаталанскийКиргизскийКитайский ТрадКитайский УпрКорейскийКорсиканскийКурманджиКхмерскийКхосаЛаосскийЛатинскийЛатышскийЛитовскийЛюксембургскийМакедонскийМалагасийскийМалайскийМалаяламМальтийскийМаориМаратхиМонгольскийНемецкийНепальскийНорвежскийПанджабиПерсидскийПольскийПортугальскийПуштуРумынскийРусскийСамоанскийСебуанскийСербскийСесотоСингальскийСиндхиСловацкийСловенскийСомалийскийСуахилиСунданскийТаджикскийТайскийТамильскийТелугуТурецкийУзбекскийУкраинскийУрдуФилиппинскийФинскийФранцузскийФризскийХаусаХиндиХмонгХорватскийЧеваЧешскийШведскийШонаШотландский (гэльский)ЭсперантоЭстонскийЯванскийЯпонский | АзербайджанскийАлбанскийАмхарскийАнглийскийАрабскийАрмянскийАфрикаансБаскскийБелорусскийБенгальскийБирманскийБолгарскийБоснийскийВаллийскийВенгерскийВьетнамскийГавайскийГаитянскийГалисийскийГолландскийГреческийГрузинскийГуджаратиДатскийЗулуИвритИгбоИдишИндонезийскийИрландскийИсландскийИспанскийИтальянскийЙорубаКазахскийКаннадаКаталанскийКиргизскийКитайский ТрадКитайский УпрКорейскийКорсиканскийКурманджиКхмерскийКхосаЛаосскийЛатинскийЛатышскийЛитовскийЛюксембургскийМакедонскийМалагасийскийМалайскийМалаяламМальтийскийМаориМаратхиМонгольскийНемецкийНепальскийНорвежскийПанджабиПерсидскийПольскийПортугальскийПуштуРумынскийРусскийСамоанскийСебуанскийСербскийСесотоСингальскийСиндхиСловацкийСловенскийСомалийскийСуахилиСунданскийТаджикскийТайскийТамильскийТелугуТурецкийУзбекскийУкраинскийУрдуФилиппинскийФинскийФранцузскийФризскийХаусаХиндиХмонгХорватскийЧеваЧешскийШведскийШонаШотландский (гэльский)ЭсперантоЭстонскийЯванскийЯпонский |
Звуковая функция ограничена 200 символами
Регулятор оборотов минидрели / Хабр
Сверление печатных плат — настоящая головная боль для электронщика, но наше новое устройство поможет ее немного смягчить. Это простое и компактное дополнение к минидрели позволит продлить жизнь двигателю и сверлам. Схема, плата, инструкции по настройке, видео — все в статье!
Это простое и компактное дополнение к минидрели позволит продлить жизнь двигателю и сверлам. Схема, плата, инструкции по настройке, видео — все в статье!
Для чего нужен регулятор оборотов
Обычно минидрели строятся на базе обычных двигателей постоянного тока. А обороты таких двигателей зависят от нагрузки и приложенного напряжения. В результате на холостых оборотах двигатель раскручивается очень сильно, а в моменты сверления обороты двигателя плавают в большом диапазоне.
Если снижать напряжение на двигателе, когда не нем нет нагрузки, можно добиться увеличения ресурса как свёрл, так и самих двигателей. Кроме того, даже точность сверления повышается. Самый простой способ добиться этого — измерение тока, потребляемого двигателем.
В интернете много схем подобных регуляторов, но большинство из них используют линейные регуляторы напряжения. Они массивные и требуют охлаждения. В соавторстве с TinyElectronicFriends нам захотелось сделать компактную плату на базе импульсного стабилизатора, чтобы она могла быть просто «надета» на двигатель.
Схема
ШИМ-регулятор со встроенным ключом MC34063 регулирует напряжение на двигателе. Напряжение на шунте R7,R9,R11 усиливается операционным усилителем и через компаратор подается на вход обратной связи ШИМ-контроллера.
Если ток меньше определенного значения, то на двигатель подается напряжение, зависящее от настройки сопротивления RV1. То есть на холостых оборотах на двигатель будет подаваться только часть мощности, а подстроечный резистор RV1 позволит отрегулировать обороты при этом.
Если сигнал на выходе ОУ превысит напряжение на компараторе, то на двигатель будет подано полное напряжение питания. То есть при сверлении двигатель будет включаться на максимальную мощность. Порог включения задается резистором RV2.
Все компоненты схемы будут рассеивать очень мало тепла и можно собрать ее полностью на SMD-компонентах. Работать она может при большом диапазоне питающих напряжений (в зависимости от сопротивления R6), не требует контроллеров и датчиков оборотов.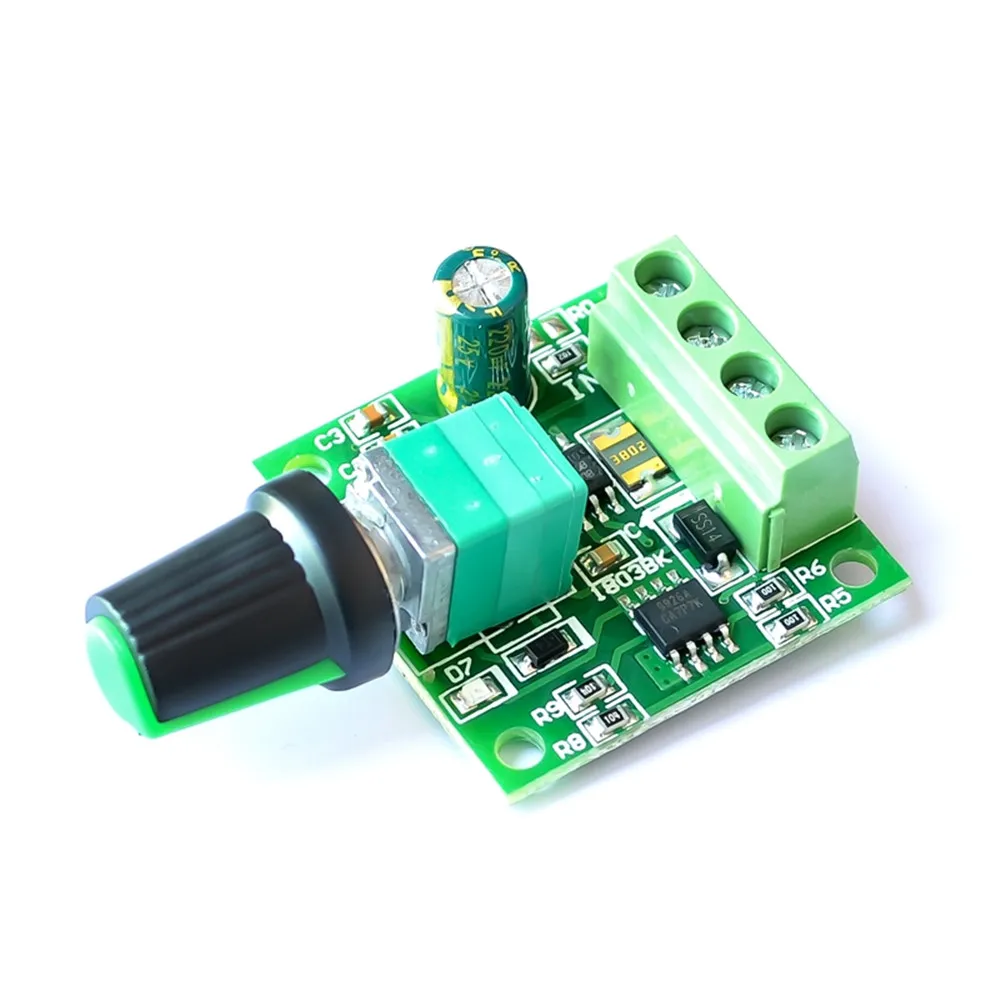
Печатная плата
Вся схема умещается на двухсторонней печатной плате диаметром 30мм. На ней всего несколько штук переходных отверстий и ее легко можно изготовить «в домашних условиях». Ниже в статье будут файлы для скачивания файла печатной платы для SprintLaout.
Перечень компонентов
Вот полный список всего, что потребуется для сборки:
- Печатная плата (ссылка на файлы для изготовления в конце статьи)
- U1 — MC34063AD, импульсный стабилизатор, SOIC-8
- U2 — LM358, операционный усилитель, SOIC-8
- U3 — L78L09, стабилизатор, SOT-89
- D1,D3 — SS14, диод Шоттки, SMA — 2шт
- D2 — LL4148, диод выпрямительный, MiniMELF
- C1 — конденсатор, 10мкФ, 50В, 1210
- C2 — конденсатор, 3.3нФ, 1206
- C3,C4 — конденсатор, 4.7мкФ, 1206 — 2шт
- C5 — конденсатор, 22мкФ, 1206
- R1-R3,R7,R9,R11 — резистор 1 Ом, 1206 — 6шт
- R4,R10 — резистор 22кОм, 1206 — 2шт
- R5 — резистор 1кОм, 1206
- R6 — резистор 10-27кОм, 1206.
 Сопротивление зависит от номинального напряжения используемого двигателя. 12В — 10кОм, 24В — 18кОм, 27В — 22кОм, 36В — 27кОм
Сопротивление зависит от номинального напряжения используемого двигателя. 12В — 10кОм, 24В — 18кОм, 27В — 22кОм, 36В — 27кОм - R8 — резистор 390 Ом, 1206
- RV1,RV2 — резистор подстрочный, 15кОм, типа 3224W-1-153 — 2шт
- XS1 — клемма, 2 конт, шаг 3,81мм
 Сопротивление зависит от номинального напряжения используемого двигателя. 12В — 10кОм, 24В — 18кОм, 27В — 22кОм, 36В — 27кОм
Сопротивление зависит от номинального напряжения используемого двигателя. 12В — 10кОм, 24В — 18кОм, 27В — 22кОм, 36В — 27кОмТакже мы сделали на 3D-принтере кольцо-ограничитель, для удобной установки на двигатель. Ссылка для скачивания STL-файла для скачивания в конце статьи.
Сборка и настройка
Собирается все достаточно просто. Контактные площадки нарисованы под ручную пайку.
Стоит начинать сборку самой платы с установки всех компонентов на стороне платы без подстроечных резисторов, а затем на обратной стороне. Клемму проще устанавливать в последнюю очередь. Номинал R6 подбирается в соответствии с номинальным напряжением вашего двигателя. В этом устройстве важно контролировать положение ключа на микросхемах и полярность диодов. Все остальные компоненты не полярные.
Между платой и двигателем над установить проставку, чтобы плата не касалась двигателя. Сама плата надевается прямо на ламели двигателя. Несколько раз проверьте полярность подключения двигателя, чтобы он крутился в правую сторону, а затем припаяйте контакты.
Сама плата надевается прямо на ламели двигателя. Несколько раз проверьте полярность подключения двигателя, чтобы он крутился в правую сторону, а затем припаяйте контакты.
Контакты для подачи напряжения, на вход платы подписаны «GND» и «+36V». Минус источника входного напряжения подключается к контакту «GND», а плюс к «+36V». Напряжение источника питания должно совпадать с номинальным напряжением двигателя.
Настройка регулятора очень проста:
- Установить резистором RV2 порог срабатывания регулятора на максимум
- Установить резистором RV1 оптимальные обороты двигателя в режиме холостого хода
- Установить резистором RV2 такой порог срабатывания, чтобы при появлении малейшей нагрузки, увеличивалось напряжение на двигателе
Видео
Эффект от использования сложно оценить по видео, но мы теперь всегда сверлим только с регулятором! Требуется лишь немного привыкнуть и следить чтобы сверла были хорошо заточены. И, конечно, его можно в любой момент просто включить на максимум на всегда.
Ссылки
Ссылки для скачивания всех необходимых файлов вы можете найти на
основной странице проекта.
Спасибо за проявленный интерес!
10А PWM12V24V48V ШИМ Регулятор оборотов двигателя постоянного тока
10А PWM12V24V48V ШИМ Регулятор оборотов двигателя постоянного тока
Входное напряжение : DC 10V-60V
Рекомендуемое напряжение: DC 12 В-48 В
Мощность: 12 В-120 Вт; 24 В-240 Вт
Номинальный ток: 10А
Максимальный ток: 20A
Материал: пластик
Использовать только для регулировки оборотов (5%-100%) Двигателя постоянного тока
Частота: 25 кГц
Размеры: 88 мм * 59 мм * 35 мм
Зашита корпуса IP 54 (Пыле и влагозащищённое)
График работы
Понедельник 08:00 — 17:00
Вторник 08:00 — 17:00
Среда 08:00 — 17:00
Четверг 08:00 — 17:00
Пятница 08:00 — 17:00
Суббота 08:00 — 15:00
Воскресенье 10:00 — 15:00
Доставка
Адресная доставка осуществляется курьером новой почты
Новая почта
Доставка товаров по Украине осуществляется на отделение “Нова пошта” в вашем городе по тарифам перевозчика. Убедительная просьба проверять комплектность и целостность товара в момент получения заказа.
Убедительная просьба проверять комплектность и целостность товара в момент получения заказа.
Наложенный платеж “Новая почта” Забирайте в отделении.
20 грн +2% комиссии
Доставка товаров по Украине осуществляется на отделение “Нова пошта” в вашем городе по тарифам перевозчика.
Доставка “Укрпошта”
Отправка только после оплаты. “наложенным платеж”, “післяплата” с укрпочтой не работаем
Самовывоз (Днепр)
В рабочие дни с 9-00 до 15-00 (с понедельника по пятницу).
В субботу с 9-00 до 13-00
Бесплатная доставка
Внимание! Бесплатно доставляются товары, на странице которых присутствует графический информер о бесплатной доставке.
Justin
Доставка товаров по Украине осуществляется на отделениях Justin
в вашем городе по тарифам перевозчика.
Формы оплаты
Оплата онлайн* (LIQPAY) (WayForPay)
Картами Visa, Mastercard любого банка,
в том числе Приват Банк и MonoBank
Оплата на карточку Приват Банк и Mono Bank
(реквизиты придут в СМС сообщении)
Наличный расчет
при самовывозе в пункте выдачи товара.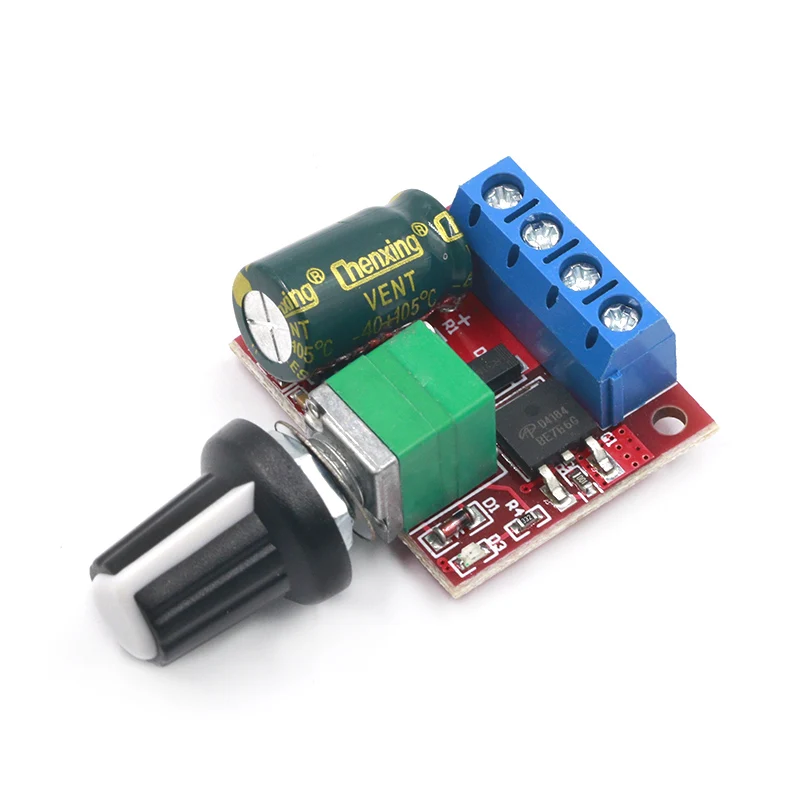
Наложенным платежом
На отделении Новой Почты
при получении груза сумма доставки составит:
Сумма доставки+ 20 грн +2% комиссии
На некоторые виды товаров (кабель, провод – отрезная продукция, или товары некратные упаковкам) действует только предварительная оплата.
Безналичный расчет НДС
(По запросу) Цена товара оговаривается отдельно
от представленной на сайте,
*перед оплатой картой рекомендуем уточнить у менеджера наличие необходимого количества на складе.
Условия возврата
Компания осуществляет возврат и обмен товара надлежащего качества в соответствии с требованиями законодательства, согласно Закону «О защите прав потребителей». (ссылка https://zakon.rada.gov.ua/laws/show/1023-12#Text)
1.Будьте внимательны при выборе необходимого метража
*Согласно закону, возврату не подлежит: весовой, отрезной, мерный товар.
2.Порядок возврата
Покупатель имеет право на обмен товара надлежащего качества на аналогичный, в течение 14 дней с момента получения.
Пересылка товара на возврат, обмен или гарантийный ремонт осуществляется за счёт покупателя
Обмен товара надлежащего качества производится, если он не использовался и если сохранен его товарный вид, потребительские свойства, пломбы, ярлыки, защитные пленки, если таковые предусмотрены производителем, а также сохранена целостность упаковки всех комплектующих и ее надлежащий вид.
3. Обратная доставка товаров осуществляется за счет покупателя.
4.Условия гарантийного обслуживания товаров.
Гарантия, на товар, распространяется по номеру заказа, присвоенному при оформлении.
Информация на каждый гарантийный, пост гарантийный случай и обмен принимаются нами в виде письма на наш электронный адрес, указанный на главной странице сайта.
В телефонном режиме данная информация НЕ принимается. При оформлении письма, на гарантийный, пост гарантийный случаи или обмен, упоминание номер заказа ОБЯЗАТЕЛЬНО!
При необоснованном обращении c целью гарантийного ремонта, покупателю может быть выставлен счет за диагностику неисправности и за обратную доставку товара. Необоснованным считается обращение по устранению неисправностей в работе изделий, не потребовавших замены или ремонта комплектующих, а также в случаях признанных не гарантийными.
Необоснованным считается обращение по устранению неисправностей в работе изделий, не потребовавших замены или ремонта комплектующих, а также в случаях признанных не гарантийными.
При появлении претензий к работоспособности товара в гарантийный срок, покупатель обязан, в первую очередь, информировать администрацию сайта, отправив сообщение администрации с описанием проблемы, в электронном письме по адресу: [email protected]
5.Возврат средств:
при наличной форме оплаты в пункте самовывоза – в течении 10 – 30 минут,
при оплате VISA/ MasterCard с момента возврата товара в магазин – в течении 24 часов, или не позднее 7 дней.
Мы выбираем для Вас только проверенных производителей качественного товара.
Весь представленный ассортимент товара на сайте проходит строгий контроль качества.
Мы всегда реагируем на отзывы и рекомендации наших покупателей.
Перед эксплуатацией внимательно ознакомьтесь с инструкцией!
Гарантия предоставляется на срок от 2-х недель до 36 месяцев в зависимости от сервисной политики производителя.
Срок гарантии указан в описании каждого товара на нашем сайте.
Обмен/возврат товара в течение 14 дней
Условия возврата : возврат товара в течение 14 дней за счет покупателя
Перед эксплуатацией внимательно ознакомьтесь с инструкцией!
Подтверждением гарантийных обязательств служит гарантийный талон производителя ПОРЯДОК ДЕЙСТВИЙ ПРИ ОБМЕНЕ И ВОЗВРАТЕ ТОВАРА
1.Товар с полной комплектацией
2. Гарантийный талон
3. Документ подтверждающий оплату и пересылку товара.
Обмен и возврат осуществляется за счет покупателя в течение 14 дней со дня продажи при условии сохранении товарного вида купленного оборудования, упаковки, и наличии документов, подтверждающих факт покупки.
В каких случаях гарантия не предоставляется: – нарушена сохранность гарантийных пломб, упаковки, нет полной комплектации, включая инструкцию – есть механические или иные повреждения, которые возникли вследствие умышленных или неосторожных действий покупателя или третьих лиц – нарушены правила использования, изложенные в эксплуатационных документах – было произведено несанкционированное вскрытие, ремонт или изменены внутренние коммуникации и компоненты товара, изменена конструкция или схемы товара.
Гарантийные обязательства не распространяются на следующие неисправности: – естественный износ или исчерпание ресурса – случайные повреждения, причиненные клиентом или повреждения, возникшие вследствие небрежного отношения или использования (воздействие жидкости, запыленности, попадание внутрь корпуса посторонних предметов ) – повреждения в результате стихийных бедствий (природных явлений) – повреждения, вызванные аварийным повышением или понижением напряжения в электросети или неправильным подключением к электросети – повреждения, вызванные дефектами системы, в которой использовался данный товар, или возникшие в результате соединения и подключения товара к другим изделиям – повреждения, вызванные использованием товара не по назначению или с нарушением правил эксплуатации
Согласно Закону «О защите прав потребителей» (ссылка https://zakon.rada.gov.ua/laws/show/1023-12#Text), компания может отказать потребителю в обмене и возврате товаров надлежащего качества, если они относятся к категориям, указанным в действующем Перечне непродовольственных товаров надлежащего качества, не подлежащих возврату и обмену.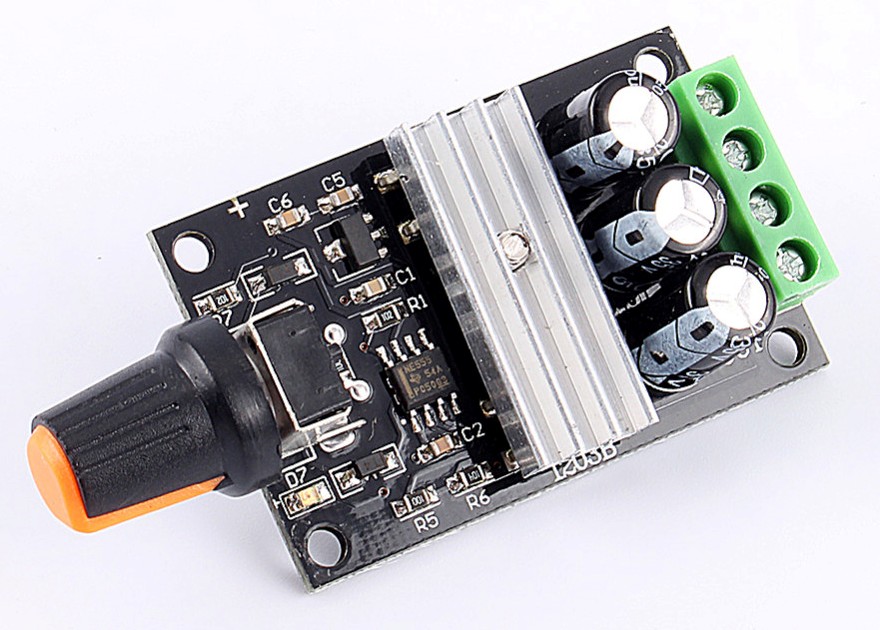 (ссылка https://zakon.rada.gov.ua/laws/show/172-94-%D0%BF#Text )
(ссылка https://zakon.rada.gov.ua/laws/show/172-94-%D0%BF#Text )
Адрес и контакты
Адрес :
Украина
Днепропетровская область
г. Днепр
прос. Пушкина, 77
Забрать оформленный заказ возможно уже через 20 минут
(при наличии товара на складе)
с 8-30 до 15-00 в будние дни
с 9-00 до 14-00 в субботу
В воскресенье пункт выдачи не работает.
Забрать заказ можно по предварительному
согласованию в телефонном режиме
( товар предварительно со склада доставляется в пункт выдачи).
Контакты :
Viber +380952304818 МТС
Viber +380675633284 Киевстар
Email [email protected]
Сайт https://elekmag.com.ua/
Только зарегистрированные клиенты, купившие этот товар, могут публиковать отзывы.
Мощный ШИМ регулятор
Очередное электронное устройство широкого применения.Представляет собой мощный ШИМ (PWM) регулятор с плавным ручным управлением. Работает на постоянном напряжении 10-50V (лучше не выходить за диапазон 12-40V) и подходит для регулирования мощности различных потребителей (лампы, светодиоды, двигатели, нагреватели) с максимальным током потребления 40А.

Прислали в стандартном мягком конверте
Корпус скрепляется на защёлках, которые легко ломаются, поэтому вскрывать аккуратно.
Внутри плата и снятая ручка регулятора
Печатная плата — двусторонний стеклотекстолит, пайка и монтаж аккуратные. Подключение через мощный клеммник.
Вентиляционные прорези в корпусе малоэффективны, т.к. почти полностью перекрываются печатной платой.
В собранном виде выглядит примерно так
Реальные размеры чуть больше заявленных: 123x55x40мм
Принципиальная электрическая схема устройства
Заявленная частота ШИМ 12kHz. Реальная частота изменяется в диапазоне 12-13kHz при регулировании выходной мощности.
При необходимости, частоту работы ШИМ можно уменьшить, подпаяв нужный конденсатор параллельно С5 (исходная ёмкость 1nF). Увеличивать частоту нежелательно, т.к. увеличатся коммутационные потери.
Переменный резистор имеет встроенный выключатель в крайнем левом положении, позволяющий отключать устройство.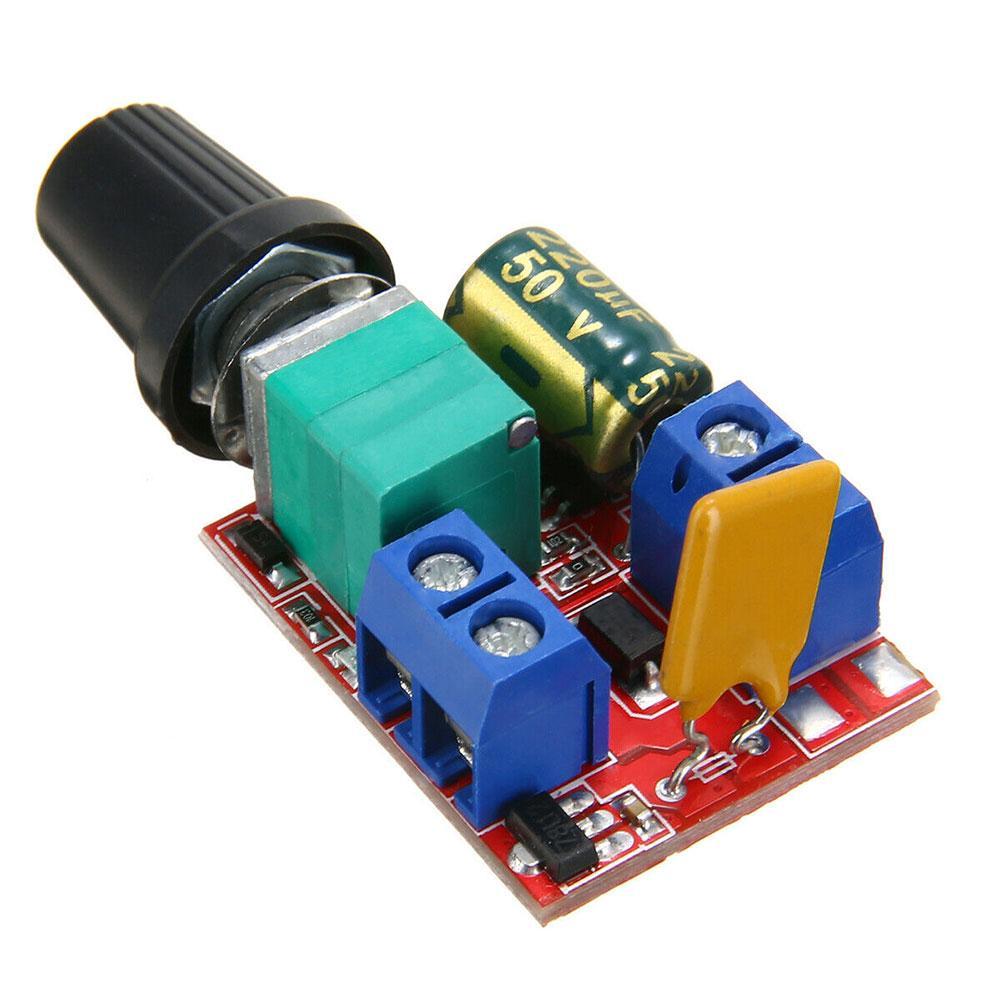 Также на плате расположен красный светодиод, горящий в рабочем состоянии регулятора.
Также на плате расположен красный светодиод, горящий в рабочем состоянии регулятора.
С микросхемы ШИМ контроллера маркировка зачем-то старательно затёрта, хотя нетрудно догадаться, что стоит аналог NE555 🙂
Диапазон регулирования близок к заявленным 5-100%
Элемент CW1 похож на стабилизатор тока в корпусе диода, но точно не уверен…
Как и на большинстве регуляторов мощности, регулирование осуществляется по минусовому проводнику. Защита от КЗ отсутствует.
На мосфетах и диодной сборке маркировка изначально отсутствует, они стоят на индивидуальных радиаторах с термопастой.
Регулятор может работать на индуктивную нагрузку, т.к. на выходе стоит сборка защитных диодов Шоттки, подавляющая ЭДС самоиндукции.
Проверка током 20А показала, что радиаторы греются незначительно и могут вытянуть больше, предположительно до 30А. Измеренное суммарное сопротивление открытых каналов полевиков всего 0,002 Ом (падает 0,04В на токе 20А).
Если снизить частоту ШИМ, вытянут все заявленные 40А. Жаль проверить не смогу…
Жаль проверить не смогу…
Выводы можете сделать сами, мне устройство понравилось 🙂
ШИМ регулятор скорости двигателя постоянного тока
Регулировать скорость вращения небольших двигателей постоянного тока очень удобно посредством широтно-импульсной модуляции — ШИМ или PWM (pulse-width modulation). Предлагаемая схема управления очень проста и собрана всего на одном распространенном и дешевом чипе LM324. Эта микросхема содержит четыре одинаковых операционных усилителя в одном корпусе. Для реализации схемы ШИМ в общем случае необходим генератор напряжения треугольной формы и компаратор. два из четырех ОУ микросхемы LM324 работают в генераторе, третий ОУ включен как компаратор. Четвёртый ОУ не используется. Никто не мешает вам использовать в этой схеме три одиночных операционных усилителя общего применения, например TL071 или один сдвоенный и один одинарный ОУ, к примеру, TL072 + TL071. В этом случае размер устройства, конечно, будет больше, чем в случае использования одно счетверенного ОУ.
Генератор напряжения треугольной формы собран на ОУ N1 и N2 по известной схеме «интегратор-компаратор». На выходе компаратора на N2 (14) формируются прямоугольные импульсы частотой около 1.6 кГц, которые по цепи обратной связи подаются на инвертирующий вход (2) интегратора, собранного на ОУ N1 через резистор R1. С выхода интегратора (1) снимается сигнал треугольной формы с той же частотой 1.6 кГц. Треугольная волна поступает на неинвертирующий вход (5) компаратора, реализованного на ОУ N3. Одновременно на инвертирующий вход N3 поступает образцовое напряжение с движка потенциометра VR1, который входит в делитель напряжения R4, R5, VR1. При указанных номиналах делителя напряжения и напряжении питания ∓12В, образцовое напряжение может принимать значения от -6 до +6 вольт, в зависимости от угла поворота оси потенциометра VR1. Компаратор N3 сравнивает треугольный сигнал на выводе 5 N3 с образцовым напряжением на выводе 6. если напряжение на выводе 5 больше напряжения на выводе 6, то на выходе N3 (7) появится высокий уровень напряжения около +12В.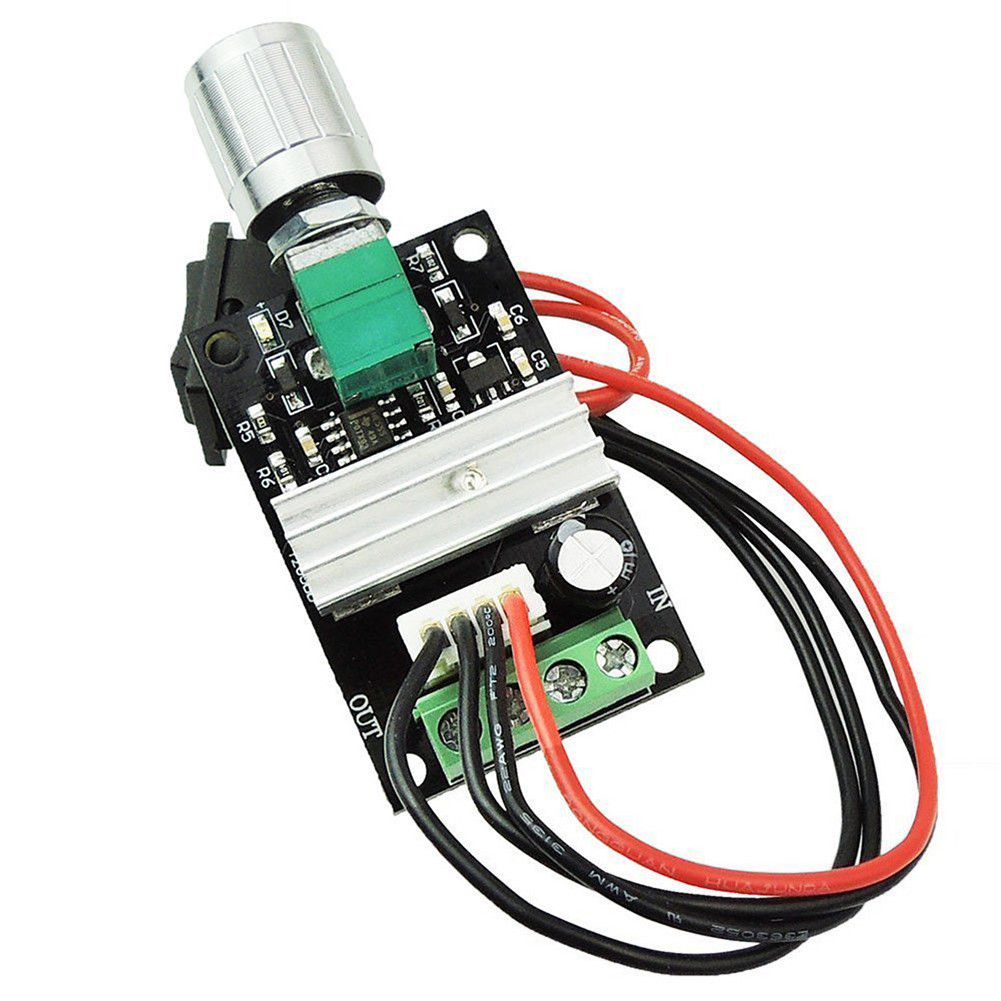 Когда напряжение на выводе 5 N3 станет меньше образцового на выводе 6, на выходе 7 N3 появится низкий уровень около -12В. Таким образом, при поступлении на вход 5 напряжения треугольной формы на выходе 7 будут формироваться прямоугольные импульсы с длительностью, зависящей от образцового напряжения на выводе 6 N3. Иными словами, мы сможем регулировать скважность прямоугольного сигнала на выходе N3, поворачивая движок потенциометра VR1.
Когда напряжение на выводе 5 N3 станет меньше образцового на выводе 6, на выходе 7 N3 появится низкий уровень около -12В. Таким образом, при поступлении на вход 5 напряжения треугольной формы на выходе 7 будут формироваться прямоугольные импульсы с длительностью, зависящей от образцового напряжения на выводе 6 N3. Иными словами, мы сможем регулировать скважность прямоугольного сигнала на выходе N3, поворачивая движок потенциометра VR1.
Наглядно процесс показан на графике ниже. Зеленая линия — это образцовое напряжение. Прямоугольный сигнал синего цвета — это выходной сигнал компаратора.
ШИМ сигнал с выхода N3 подается га затвор MOSFET транзистора Т1. двигатель постоянного тока включен в цепь стока этого транзистора. Во время действия высокого уровня напряжения полевой транзистор открывается и подключает двигатель к источнику питания. Во время действия напряжения низкого уровня транзистор закрыт и мотор обесточен. Поскольку это происходит со сравнительно высокой частотой, средний ток, протекающий через мотор зависит от скважности (длительности) прямоугольных импульсов. поступающих на затвор транзистора. Чем больше длительность импульса, тем больше будет средний ток, проходящий через двигатель и наоборот. таким образом происходит регулировка частоты вращения мотора.
поступающих на затвор транзистора. Чем больше длительность импульса, тем больше будет средний ток, проходящий через двигатель и наоборот. таким образом происходит регулировка частоты вращения мотора.
Для работы схемы требуется двухполярный источник питания напряжением ∓12В. Схема может быть модифицированна для использования с двигателями постоянного тока, рассчитанными на напряжение от 6 до 24 вольт.
По следам китайского регулятора оборотов HX-PWM — Электропривод
Прочитав тему «DC-регулятор 500W для двигателя китайского станка» https://www.chipmaker.ru/topic/128809/ , подумал, что неплохо бы тоже заменить штатный тиристорный регулятор в своем токарнике MML1830V. Но на алиэкспрессе и ибее регулятор HX-PWM, доработка которого описана в теме, уже давно исчез из продажи.
Вдруг недавно я натолкнулся на алиэкспрессе на новую продажу этого регулятора и заказал его. Но тут меня ожидал сюрприз. Вместо него приехал другой регулятор — HQ-SXPWM, сделанный по совершенно другой схеме — с управляющим микроконтроллером и на другой элементной базе.
С одной стороны, я несколько расстроился, поскольку новый регулятор – это «черный ящик», в отличие от регулятора HX-PWM, схема которого хоть в некоторой степени известна и, самое главное, имеет возможность доработки, что неопровержимо доказал Владимир vsh, а также, в случае чего, достаточно ремонтопригодна, что тоже немаловажно.
С другой стороны, другой наш коллега — Владимир Katolix, который уже купил новый регулятор, рассказал мне, что он нормально работает и без допиливания.
В общем, подключил я его к станку и стал тестировать. Результат меня несколько охладил. Нет, работает-то он нормально, не глючит, но, даже при установке на максимум параметра, отвечающего за стабилизацию оборотов под нагрузкой, по крутящему моменту на малых оборотах он проиграл слегка подрегулированному штатному тиристорному регулятору. Вот такой пердимонокль. Возможно, судя по заявленным параметрам, он лучше работает с более мощными движками, чем с моим на 600 китайских ватт.
Понятное дело, прошивка микроконтроллера — тайна за семью печатями, и изменить чисто программно ничего не получится. Попытался я проследить по плате, какие номиналы деталей можно было бы поменять, чтобы увеличить величину сигнала используемого для ПОС, но как-то с наскока явно ничего не нашел. Да и ковыряться в СМД монтаже не было сил.
В результате, я пришел к решению собрать регулятор самому. Правда, поиск в сети более-менее вменяемых исходников ШИМ-регуляторов для двигателей с таким напряжением питания пока толком результатов не дал. В качестве одного из исходников я восстановил схему регулятора HX-PWM по фото и описаниям платы из вышеуказанной темы. А также схему с доработками, сделанными Владимиром vsh. Не факт, что буду делать именно такой вариант, но, думаю, даже при всем том, что владельцев этого регулятора немного, кому-нибудь схема да пригодится. Например, для ремонта (тьфу три раза).
Хочу выразить огромную благодарность Владимиру vsh, за помощь и время, потраченное на вразумление меня. А так же Валерию Khom за предоставленный вариант схемы, восстановленной им. Без их помощи я бы колупался значительно дольше.
А так же Валерию Khom за предоставленный вариант схемы, восстановленной им. Без их помощи я бы колупался значительно дольше.
Поскольку при присоединении к сообщению картинок качество их снижается даже при выкладывании через галерею, положил упаковку с файлами в файловый архив https://www.chipmake…les/file/16189/ В упаковке две схемы в формате программы sPlan7.0 ( в более ранних версиях этой программы они открываться не будут) и те же две схемы в графическом формате GIF.
Теперь некоторые пояснения к схемам.
На исходной схеме не нарисован диодный мост для питания статорной обмотки, поскольку для двигателя с постоянными магнитами он не нужен, а место на схеме занимает. И так пришлось все ужать, чтобы поместить схему на листе А4.
Нумерация клемм сделана так, как они расположены на блоке регулятора — слева направо. Естественно, клеммы для статорной обмотки не нарисованы и их номера пропущены. Эти клеммы используются в доработанной варианте регулятора для подключения светодиода-индикатора перегрузки.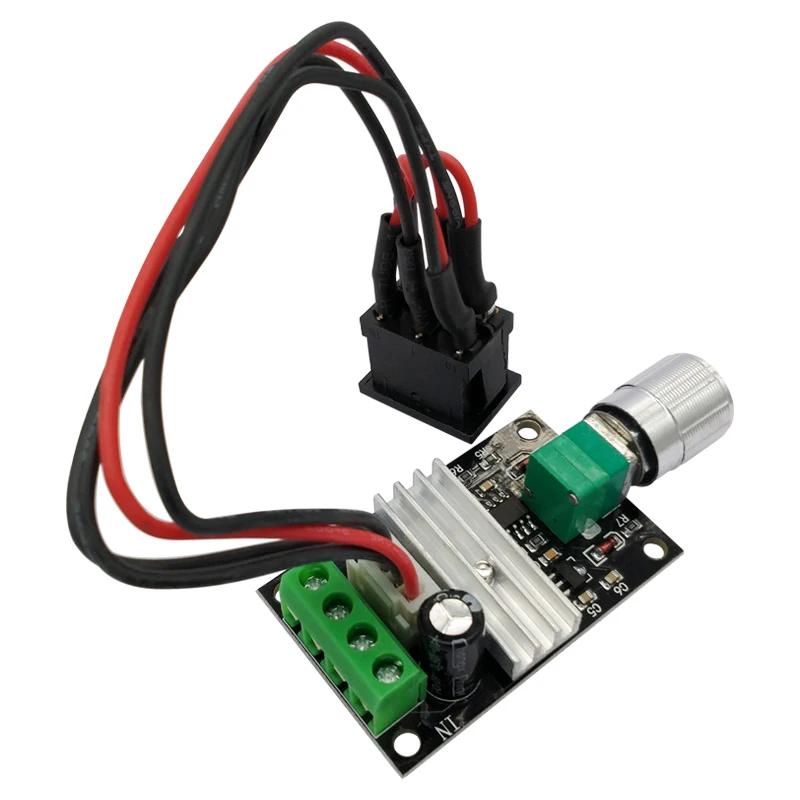 Но на схеме с доработками этот индикатор нарисован без подключения через клеммы, опять же по соображениям «впихивания» в схему без излишних ее перекраиваний.
Но на схеме с доработками этот индикатор нарисован без подключения через клеммы, опять же по соображениям «впихивания» в схему без излишних ее перекраиваний.
Изменения в схеме, вызванные доработками, сделаны красным цветом. Нумерация вновь введенных элементов продолжает нумерацию элементов исходной схемы.
Вновь введенный конденсатор С25 между минусом высоковольтного выпрямителя и металлическим корпусом регулятора, а также варистор, подключенный параллельно двигателю, в теме не были описаны. О них Владимир vsh сообщил дополнительно. Варистор с классификационным напряжением 390 вольт. Какой конкретно, в смысле максимальной поглощаемой энергии, Владимир не указал, а я уточнять не стал и указал номинал по максимуму поглощаемой энергии.
У некоторых элементов в исходной схеме — диодного моста, диодов, биполярных транзисторов, терморезистора и одного предохранителя, отсутствуют указания типов, поскольку на фото платы их не было. Кроме того, может быть разница в комлектации конкретного ВАШЕГО экземпляра регулятора силовыми элементами. Возможны как замена аналогами тех, что указаны на схеме, так и замена двух ключевых мосфетов одним, рассчитанным на удвоенный ток.
Возможны как замена аналогами тех, что указаны на схеме, так и замена двух ключевых мосфетов одним, рассчитанным на удвоенный ток.
Пока всё. Продолжение следует.
Управление скоростью двигателя постоянного тока с использованием широтно-импульсной модуляции (ШИМ)
Методы широтно-импульсной модуляции (ШИМ) или изменения рабочего цикла обычно используются при управлении скоростью двигателей постоянного тока. Рабочий цикл определяется как процентное соотношение цифровой «высокой» к цифровой «низкой» плюс цифровой «высокой» ширины импульса в течение периода ШИМ. На рис. 1 показаны импульсы 5 В с рабочим циклом от 0% до 50%.
Рис. 1. Плюсы с рабочим циклом от 0% до 50% Среднее значение постоянного напряжения для рабочего цикла 0% равно нулю; при рабочем цикле 25% среднее значение равно 1.25 В (25% от 5 В). При рабочем цикле 50% среднее значение составляет 2,5 В, а при рабочем цикле 75% среднее напряжение составляет 3,75 В и так далее. Максимальный рабочий цикл может составлять 100%, что эквивалентно форме сигнала постоянного тока.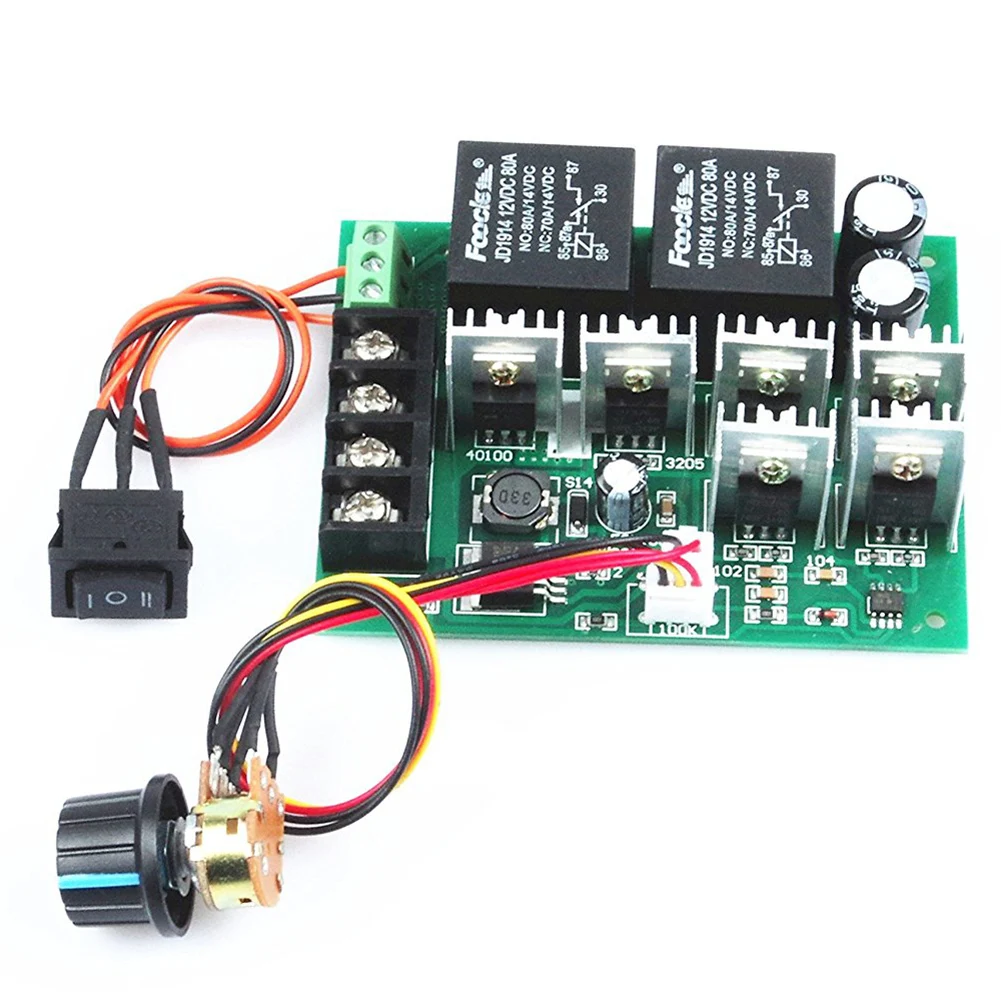 Таким образом, изменяя ширину импульса, мы можем изменять среднее напряжение на двигателе постоянного тока и, следовательно, его скорость.
Таким образом, изменяя ширину импульса, мы можем изменять среднее напряжение на двигателе постоянного тока и, следовательно, его скорость.
Схема простого регулятора скорости для мини-двигателя постоянного тока, такого как тот, который используется в магнитофонах и игрушках, показана на рис. 2.
Рис. 2: Управление скоростью двигателя постоянного тока с использованием метода ШИМОписание цепи:
Здесь инвертирующий триггер Шмитта N1 сконфигурирован как нестабильный мультивибратор с постоянным периодом, но переменной скважностью.Хотя полное внутрисхемное сопротивление VR1 во время полного цикла составляет 100 кОм, часть, используемая во время положительных и отрицательных периодов каждого цикла, может быть изменена путем изменения положения его контакта стеклоочистителя для получения переменной ширины импульса. Затвор Шмитта N2 просто действует как буфер / драйвер для управления транзистором T1 во время положительных воздействий на его базу. Таким образом, средняя амплитуда импульсов привода постоянного тока или скорость двигателя M пропорциональна настройке положения стеклоочистителя потенциометра VR1. Конденсатор C2 служит накопительным конденсатором для обеспечения стабильного напряжения в цепи.
Таким образом, средняя амплитуда импульсов привода постоянного тока или скорость двигателя M пропорциональна настройке положения стеклоочистителя потенциометра VR1. Конденсатор C2 служит накопительным конденсатором для обеспечения стабильного напряжения в цепи.
Таким образом, изменяя VR1, рабочий цикл может быть изменен от 0% до 100%, а скорость двигателя с «остановленного» состояния на «полную скорость» равномерно и непрерывно. Диоды эффективно обеспечивают различные значения резистора синхронизации во время зарядки и разрядки конденсатора синхронизации C1.
Рис. 3. Конфигурация контактов BC337A. Период импульса или покоя приблизительно определяется следующим уравнением: период импульса или покоя ≈ 0,4 x C1 (Фарада) x VR1 (Ом) секунд. Здесь используйте внутрисхемное значение VR1 во время импульса или периода покоя, если это применимо.
Частота останется постоянной и определяется уравнением:
Частота ≈ 2,466 / (VR1.C1) ≈ 250 Гц (для VR1 = 100 кОм и C1 = 0,1 мкФ)
Рекомендуемое значение внутрисхемного сопротивления должно быть больше 50 кОм, но меньше 2 мегаом, а емкость конденсатора должна быть больше 100 пФ, но меньше 1 мкФ.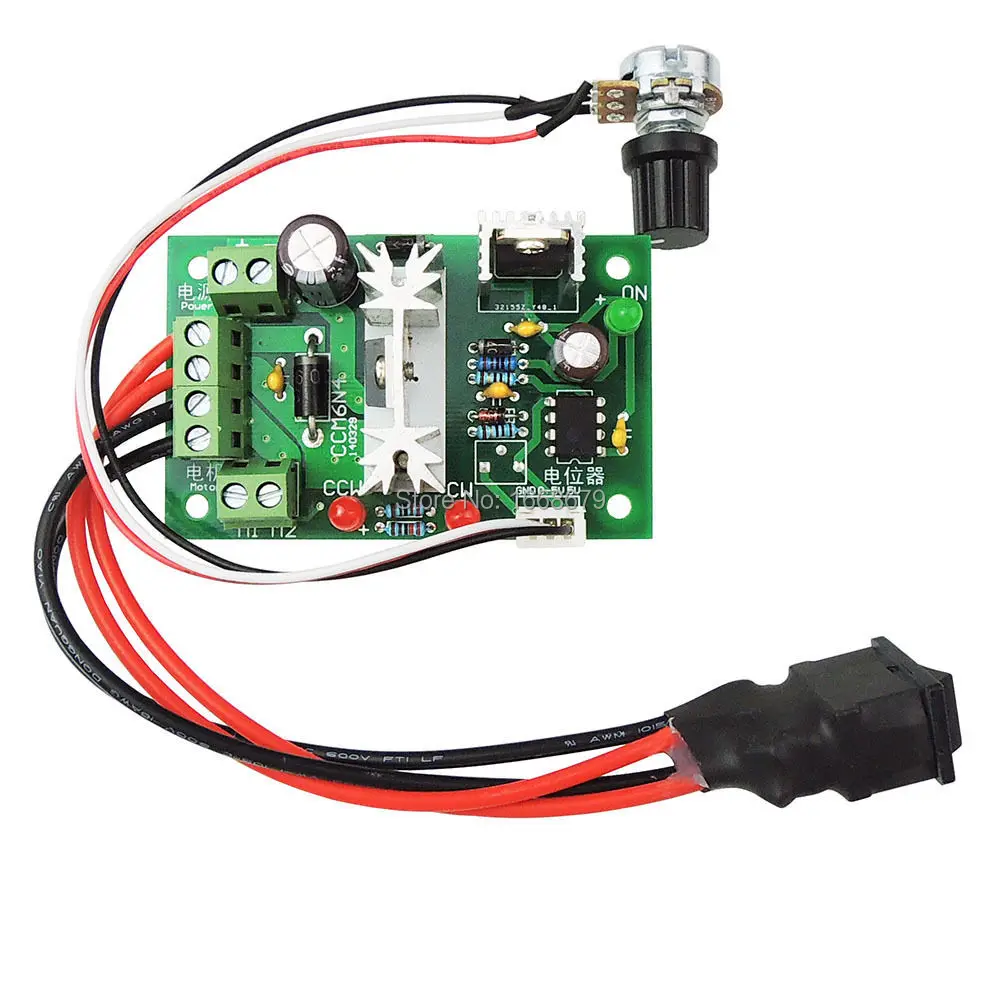
Больше интересных проектов можно найти здесь.
Эта статья была впервые опубликована 28 июня 2017 г. и обновлена 23 июля 2019 г.
Простой двигатель постоянного тока с ШИМ-регулированием скорости
Модель 555 широко распространена и может использоваться в качестве простого ШИМ-регулятора скорости
Описание
555 Ic подключен как нестабильный, а частота постоянна и не зависит от рабочего цикла, так как полное сопротивление (заряд R + разряд R, обратите внимание на диод) постоянно и равно 22 кОм (что дает частоту около 1 кГц, обратите внимание на гул).
Когда потенциометр полностью поднят, сопротивление заряда R составляет 1,0 кОм (диод предотвращает заряд конденсатора через вторую секцию потенциометра и другой резистор 1,0 кОм), а Rdischarge составляет 21 кОм, что дает 5% рабочего цикла и частота 1 кГц.
Когда потенциометр полностью опущен, сопротивление заряда R составляет 21,0 кОм (диод предотвращает заряд конденсатора через вторую секцию потенциометра и другой резистор 1,0 кОм), а Rdischarge составляет 1 кОм, что дает 95% рабочего цикла и частота 1 кГц.
Когда потенциометр установлен на 50%, сопротивление заряда R составляет 11,0 кОм (диод предотвращает заряд конденсатора через вторую секцию потенциометра и другой резистор 1,0 кОм), а Rразряд составляет 11 кОм, что дает рабочий цикл 50% и частота 1 кГц.
Модель 555 обеспечивает хорошую пропускную способность по току, чтобы быстро управлять полевым МОП-транзистором и управлять биполярным транзистором.
Я фактически использую эту систему для привода двигателя постоянного тока моей маленькой катушки Тесла с вращающимся искровым разрядником с переменной скоростью
Если вас раздражает гудение двигателя 1 кГц, попробуйте поднять частоту за пределы слышимого диапазона (заменив потенциометр), но помните, что при более высокой частоте индуктивное реактивное сопротивление двигателя возрастает, поэтому эффективность снижается.
Важно
Очевидно, что полевой МОП-транзистор (или биполярный) должен иметь достаточный ток для управления двигателем, поэтому ток стока (или коллектора) должен быть равен максимальному току двигателя (при напряжении источника питания, когда он заблокирован). Демпферный диод тоже, потому что он закорачивает двигатель в выключенном состоянии. И MOSFET (или биполярный), и диод необходимо подключить (если вы не хотите, чтобы они готовились ;-)) к радиатору
Демпферный диод тоже, потому что он закорачивает двигатель в выключенном состоянии. И MOSFET (или биполярный), и диод необходимо подключить (если вы не хотите, чтобы они готовились ;-)) к радиатору
, если максимальный ток двигателя превышает 100 или 200 мА. Я предлагаю не перегружать двигатель слишком большой работой, потому что это перегревает и двигатель, и транзистор, и диод.
Если вы не хотите торможения в выключенном состоянии, просто подключите резистор последовательно с демпфирующим диодом, он должен немного повысить эффективность, но будет иметь большую инерцию при замедлении двигателя.Номинал резистора должен быть R = V (пробойный транзистор) / I max , а мощность должна быть 5Вт. В полевых транзисторах есть внутренний стабилитрон, но не рассчитывайте на него 😉
UK1133 | Цифровой контроллер скорости двигателя постоянного тока (PWM) 50A
Артикул: UK1133
Управляйте скоростью двигателя постоянного тока без ущерба для крутящего момента. Этот контроллер двигателя постоянного тока с широтно-импульсной модуляцией (ШИМ) может обеспечивать максимальный непрерывный ток 50А для вашего двигателя постоянного тока или другой нагрузки постоянного тока благодаря конструкции на основе цифрового микроконтроллера (PIC) и высокоэффективному полевому МОП-транзистору высокой мощности 202А для охладителя. операция.Также доступен дополнительный ЖК-модуль, который будет точно указывать текущую установленную частоту и рабочий цикл для точного управления сигналом ШИМ. Контроллер имеет два режима работы: фиксированная или регулируемая частота. В режиме работы с фиксированной частотой контроллер работает на частоте 120 Гц. В режиме работы с переменной частотой частота регулируется от 400 Гц до 3 кГц. Рабочий цикл полностью регулируется от 0% до 100% в обоих режимах. Вентилятор постоянного тока входит в комплект поставки контроллера мотора для надежной и надежной непрерывной работы при высоких нагрузках.Обратите внимание, что вентилятор постоянного тока рассчитан только на работу с напряжением питания до 12 В постоянного тока.
Этот контроллер двигателя постоянного тока с широтно-импульсной модуляцией (ШИМ) может обеспечивать максимальный непрерывный ток 50А для вашего двигателя постоянного тока или другой нагрузки постоянного тока благодаря конструкции на основе цифрового микроконтроллера (PIC) и высокоэффективному полевому МОП-транзистору высокой мощности 202А для охладителя. операция.Также доступен дополнительный ЖК-модуль, который будет точно указывать текущую установленную частоту и рабочий цикл для точного управления сигналом ШИМ. Контроллер имеет два режима работы: фиксированная или регулируемая частота. В режиме работы с фиксированной частотой контроллер работает на частоте 120 Гц. В режиме работы с переменной частотой частота регулируется от 400 Гц до 3 кГц. Рабочий цикл полностью регулируется от 0% до 100% в обоих режимах. Вентилятор постоянного тока входит в комплект поставки контроллера мотора для надежной и надежной непрерывной работы при высоких нагрузках.Обратите внимание, что вентилятор постоянного тока рассчитан только на работу с напряжением питания до 12 В постоянного тока. Для работы с более высоким напряжением необходимо заменить вентилятор постоянного тока.
Для работы с более высоким напряжением необходимо заменить вентилятор постоянного тока.
Характеристики:
- Напряжение питания / нагрузки: от 9 до 30 В постоянного тока (рекомендуется 12 В постоянного тока)
- Функция плавного пуска
- Максимальный непрерывный ток: 50 А при 100 Гц
- Частота: фиксированная (120 Гц), регулируемая (от 400 Гц до 3 кГц)
- Диапазон рабочего цикла ШИМ: 0% — 100%
- Высокоэффективная конструкция с использованием мощного полевого МОП-транзистора для холодного режима работы
- Включает большие двойные лопаточные клеммы для простоты подключения
- Включает радиатор, вентилятор 12 В постоянного тока, ручки
- Применения: управление двигателем , HHO, светодиодный диммер (DC), контроль нагрева и т. Д.
- Размеры: 4,03 дюйма x 2,82 дюйма
- Дополнительный ЖК-модуль: LCD1133
3 Объяснение простых схем контроллера скорости двигателя постоянного тока
Схема, которая позволяет пользователю линейно управлять скоростью подключенного двигателя путем вращения присоединенного потенциометра, называется схемой контроллера скорости двигателя.
Здесь представлены 3 простых в сборке схемы регулятора скорости для двигателей постоянного тока: одна с использованием полевого МОП-транзистора IRF540, вторая с использованием IC 555 и третья концепция с IC 556 с обработкой крутящего момента.
Дизайн № 1: Контроллер скорости двигателя постоянного тока на основе Mosfet
Очень крутая и простая схема контроллера скорости двигателя постоянного тока может быть построена с использованием всего одного МОП-транзистора, резистора и потенциометра, как показано ниже:
Использование Эмиттерный повторитель BJT
Как видно, МОП-транзистор настроен как повторитель источника или общий режим стока, чтобы узнать больше об этой конфигурации, вы можете обратиться к этому сообщению, в котором обсуждается версия BJT, тем не менее принцип работы остается тем же .
В приведенной выше конструкции контроллера двигателя постоянного тока регулировка потенциометра создает изменяющуюся разность потенциалов на затворе МОП-транзистора, а вывод истока МОП-транзистора просто следует за значением этой разности потенциалов и соответственно регулирует напряжение на двигателе.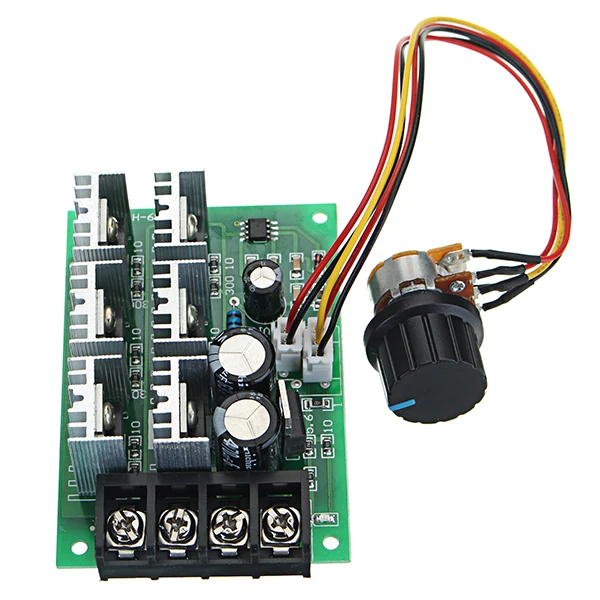
Это означает, что источник всегда будет на 4 или 5 В отставать от напряжения затвора и будет меняться вверх / вниз с этой разницей, представляя переменное напряжение между 2 и 7 В на двигателе.
Когда напряжение затвора составляет около 7 В, вывод истока будет подавать минимум 2 В на двигатель, вызывая очень медленное вращение двигателя, и 7 В будет доступно на выводе истока, когда регулировка потенциометра генерирует полное 12 В на затворе. МОП-транзистора.
Здесь мы можем ясно видеть, что вывод истока mosfet, кажется, «следует» за затвором и, следовательно, за повторителем источника имени.
Это происходит потому, что разница между затвором и истоком МОП-транзистора всегда должна быть около 5В, чтобы МОП-транзистор работал оптимально.
В любом случае, вышеуказанная конфигурация помогает обеспечить плавное регулирование скорости двигателя, и конструкция может быть построена довольно дешево.
BJT может также использоваться вместо MOSFET, и фактически BJT будет обеспечивать более высокий диапазон регулирования от 1 В до 12 В на двигателе.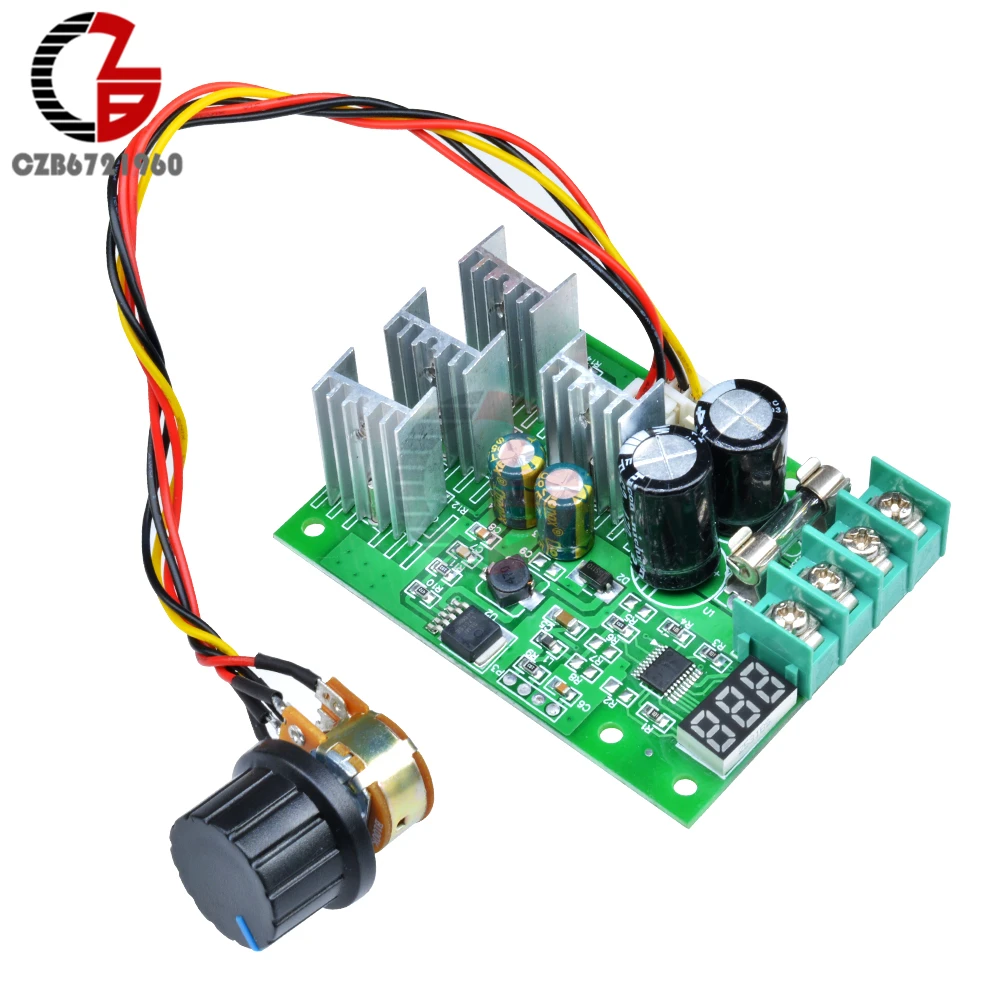
Video Demo
Когда дело доходит до управления скоростью двигателя равномерно и эффективно, контроллер на основе PWM становится идеальным вариантом, здесь мы узнаем больше о простой схеме для реализации этой операции.
Использование полевого МОП-транзистора в качестве потенциометра высокой мощности
На следующем рисунке ниже показана очень простая схема контроллера скорости двигателя постоянного тока, в которой полевой МОП-транзистор используется в качестве мощного потенциометра (реостата).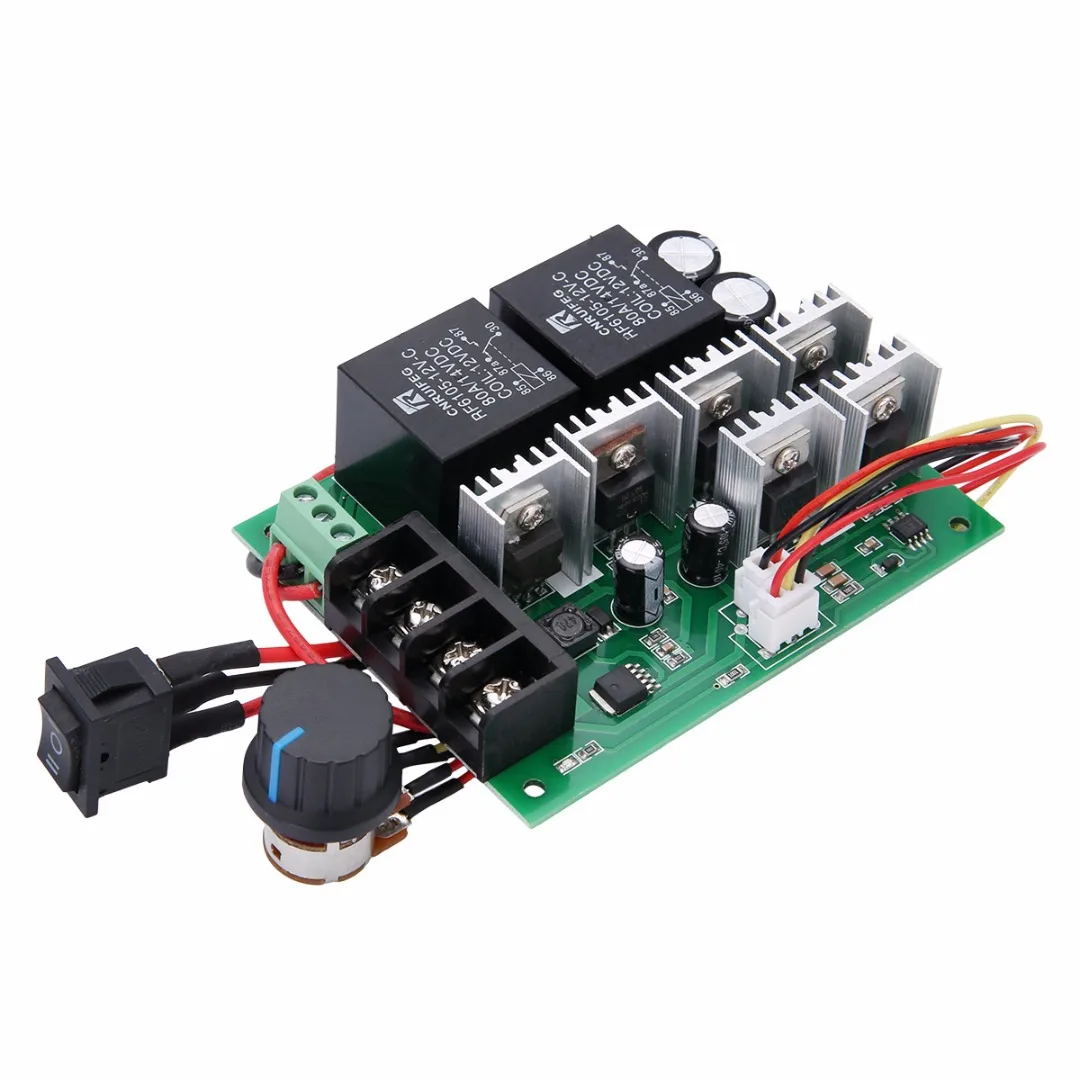 Схема разработана для работы с двигателями постоянного тока на 12 В, имеющими пиковый ток ниже 5 А.
Схема разработана для работы с двигателями постоянного тока на 12 В, имеющими пиковый ток ниже 5 А.
Питание переменного тока от сети подается через двухпозиционный переключатель S1 на первичную обмотку развязывающего и понижающего трансформатора T1. Двухтактная схема выпрямителя D1 и D2 в двухполупериодном режиме выпрямляет выходной сигнал T1, и результирующий нефильтрованный выходной сигнал постоянного тока сглаживается до определенной степени с помощью C1 для создания относительно постоянного потенциала постоянного тока.
На этом выходе постоянного тока может быть значительный уровень пульсации, однако в данном приложении это неважно.Tr1 обеспечивает питание нагрузки и смещается через резистивный делитель, состоящий из R1, VR1 и R2.
Напряжение смещения затвора, подаваемое на Tr1, может быть недостаточным, чтобы позволить полевому МОП-транзистору вести себя осмысленно со скребком VR1 на конце его вращения R2, и двигатель не будет работать. Перемещение скребка VR1 к противоположному концу его вращения позволяет постоянно увеличивать смещение, подаваемое на Tr1, что приводит к неуклонно уменьшающемуся сопротивлению стока к истоку.
Из-за этого мощность, подаваемая на двигатель, увеличивается вместе со скоростью двигателя, пока Tr1 не достигнет насыщения (когда двигатель работает на полной скорости). Таким образом, VR1 можно использовать для изменения скорости двигателя с минимальной на максимальную.
C2 отфильтровывает любое количество сетевого гула или других электрических помех, которые в противном случае могли бы быть уловлены высокоомной схемой затвора Tr1, предотвращая снижение скорости двигателя до нуля. D3 — это защитный диод, который предотвращает любые чрезмерные всплески обратного напряжения, которые могут возникнуть в результате чрезмерно индуктивной нагрузки двигателя.
Дизайн № 2: ШИМ-управление двигателем постоянного тока с помощью IC 555
Конструкцию простого контроллера скорости двигателя, использующего ШИМ, можно понять следующим образом:
Первоначально, когда схема запитана, контакт триггера находится в низком логическом положении, поскольку конденсатор С1 не заряжается.
Вышеупомянутые условия инициируют цикл колебаний, переводя выходной сигнал на высокий логический уровень.
Высокий выходной сигнал теперь заставляет конденсатор заряжаться через D2.
При достижении уровня напряжения, составляющего 2/3 напряжения питания, вывод 6, который является порогом срабатывания триггера IC.
Момент срабатывает на контакте №6, на контакте №3 и №7 устанавливается низкий логический уровень.
При низком уровне на выводе 3, C1 снова начинает разряжаться через D1, и когда напряжение на C1 падает ниже уровня, составляющего 1/3 напряжения питания, выводы №3 и №7 снова становятся высокими, вызывая цикл следовать и повторять.
Интересно отметить, что C1 имеет два дискретно установленных пути для процесса зарядки и разрядки через диоды D1, D2 и через резистивные плечи, устанавливаемые потенциометром, соответственно.
Это означает, что сумма сопротивлений, с которыми сталкивается C1 во время зарядки и разрядки, остается неизменной независимо от того, как установлен потенциометр, поэтому длина волны выходного импульса всегда остается неизменной.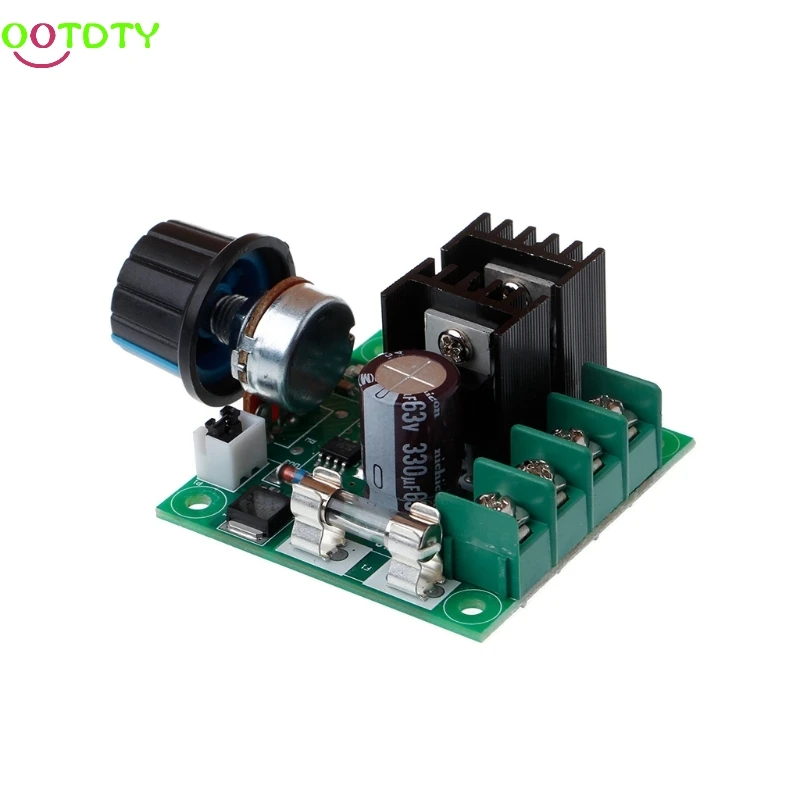
Однако, поскольку периоды времени зарядки или разрядки зависят от значения сопротивления, встречающегося на их пути, горшок дискретно устанавливает эти периоды времени в соответствии с его настройками.
Поскольку периоды времени зарядки и разрядки напрямую связаны с рабочим циклом выхода, они меняются в зависимости от настройки потенциометра, давая форму предполагаемым изменяющимся импульсам ШИМ на выходе.
Средний результат отношения метка / пространство дает выход ШИМ, который, в свою очередь, управляет скоростью двигателя постоянного тока.
Импульсы ШИМ подаются на затвор МОП-транзистора, который реагирует и регулирует ток подключенного двигателя в ответ на настройку потенциометра.
Уровень тока двигателя определяет его скорость и, таким образом, реализует управляющий эффект через потенциометр.
Частоту на выходе ИС можно рассчитать по формуле:
F = 1.44 (VR1 * C1)
МОП-транзистор можно выбрать в соответствии с требованиями или током нагрузки.
Принципиальная схема предлагаемого регулятора скорости двигателя постоянного тока представлена ниже:
Прототип:
Тестирование видео:
В приведенном выше видеоролике мы можем увидеть, как IC 555 основан на конструкция используется для управления скоростью двигателя постоянного тока. Как вы можете видеть, хотя лампочка отлично реагирует на ШИМ и меняет свою интенсивность от минимального свечения до максимально слабого, двигатель этого не делает.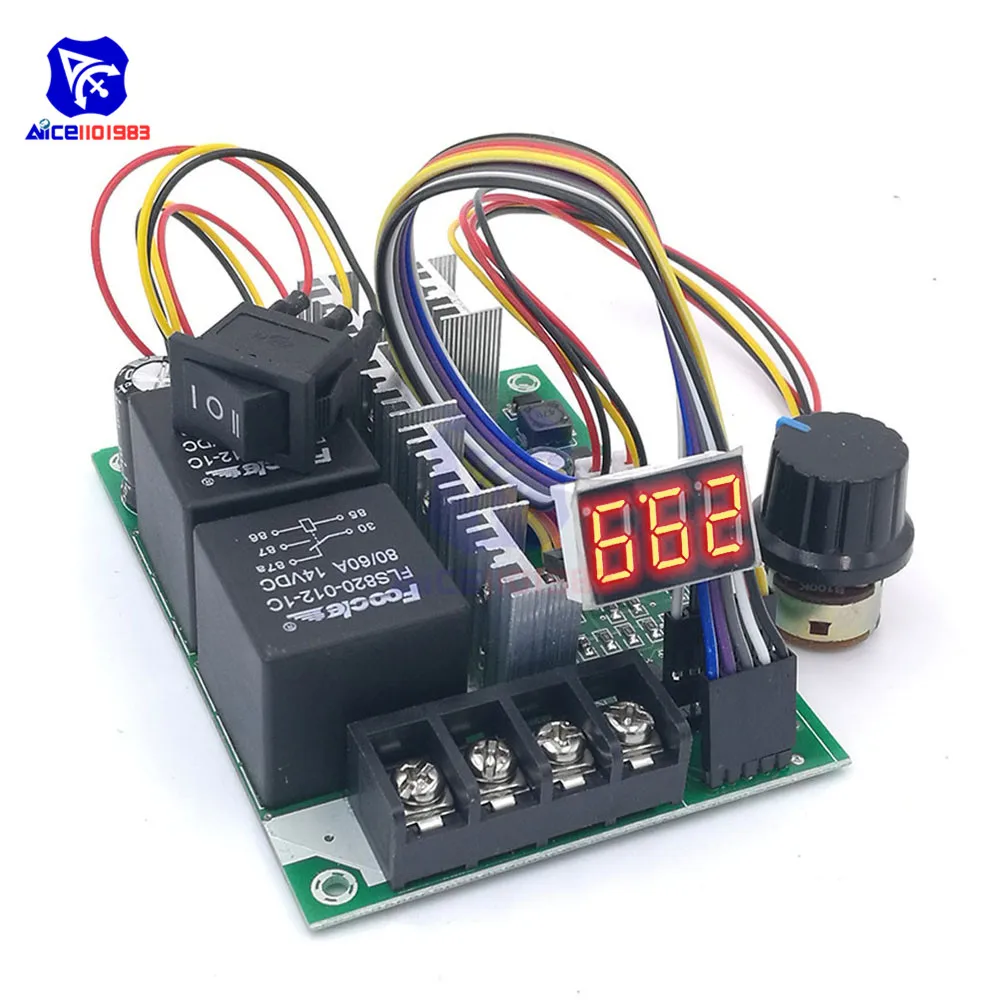
Двигатель изначально не реагирует на узкие ШИМ, а запускается рывком после того, как ШИМ настроены на значительно более высокие значения длительности импульса.
Это не означает, что в цепи есть проблемы, это потому, что якорь двигателя постоянного тока плотно зажат между парой магнитов. Чтобы инициировать запуск, якорь должен совершить скачок своего вращения через два полюса магнита, что не может произойти при медленном и плавном движении. Он должен начинаться с укола.
Именно поэтому двигатель изначально требует более высоких настроек ШИМ, и как только начинается вращение, якорь приобретает некоторую кинетическую энергию, и теперь достижение более низкой скорости становится возможным с помощью более узких ШИМ.
Тем не менее, перевод в состояние «еле-еле медленно» может оказаться невозможным по той же причине, что описана выше.
Я изо всех сил старался улучшить отклик и добиться максимально медленного управления ШИМ, сделав несколько модификаций на первой диаграмме, как показано ниже:
Сказав это, двигатель мог бы показать лучшее управление на более медленных уровнях, если бы двигатель прикреплен или обвязан грузом через шестерни или систему шкивов.
Это может произойти из-за того, что нагрузка действует как демпфер и помогает обеспечить управляемое движение во время регулировки более низкой скорости.
Дизайн № 3: Использование IC 556 для улучшенного управления скоростью
Изменение скорости двигателя постоянного тока может показаться не таким сложным, и вы можете найти множество схем для этого.
Однако эти схемы не гарантируют постоянных уровней крутящего момента при более низких скоростях двигателя, что делает их работу весьма неэффективной.
Кроме того, на очень низких скоростях из-за недостаточного крутящего момента двигатель имеет тенденцию останавливаться.
Еще одним серьезным недостатком является то, что в этих схемах нет функции реверсирования двигателя.
Предлагаемая схема полностью лишена вышеуказанных недостатков и способна создавать и поддерживать высокие уровни крутящего момента даже при минимально возможных скоростях.
Работа схемы
Прежде чем обсуждать предложенную схему контроллера двигателя с ШИМ, мы также хотели бы изучить более простую альтернативу, которая не так эффективна. Тем не менее, это можно считать достаточно хорошим, если нагрузка на двигатель невелика, и пока скорость не снижена до минимального уровня.
Тем не менее, это можно считать достаточно хорошим, если нагрузка на двигатель невелика, и пока скорость не снижена до минимального уровня.
На рисунке показано, как одну микросхему 556 IC можно использовать для управления скоростью подключенного двигателя, мы не будем вдаваться в подробности, единственным заметным недостатком этой конфигурации является то, что крутящий момент прямо пропорционален скорости двигателя. .
Возвращаясь к предлагаемой конструкции схемы контроллера скорости с высоким крутящим моментом, здесь мы использовали две микросхемы 555 вместо одной или, скорее, одну микросхему 556, которая содержит две микросхемы 555 в одном корпусе.
Принципиальная схема
Основные характеристики
Вкратце предлагаемый контроллер двигателя постоянного тока включает следующие интересные особенности:
Скорость можно плавно изменять от нуля до максимума, без остановки.
На крутящий момент никогда не влияют уровни скорости и он остается постоянным даже при минимальных уровнях скорости.
Вращение двигателя можно изменить или изменить за доли секунды.
Скорость регулируется в обоих направлениях вращения двигателя.
Двум микросхемам 555 назначены две отдельные функции. Одна секция сконфигурирована как нестабильный мультивибратор, генерирующий такты прямоугольной волны 100 Гц, которые подаются на предыдущую секцию 555 внутри корпуса.
Вышеупомянутая частота отвечает за определение частоты ШИМ.
Транзистор BC 557 используется в качестве источника постоянного тока, который поддерживает заряженным соседний конденсатор на его плече коллектора.
При этом на вышеуказанном конденсаторе создается пилообразное напряжение, которое сравнивается внутри микросхемы 556 IC с напряжением образца, приложенным извне по показанной схеме контактов.
Напряжение выборки, прикладываемое извне, может быть получено из простой схемы источника питания с переменным напряжением 0–12 В.
Это изменяющееся напряжение, прикладываемое к микросхеме 556 IC, используется для изменения ШИМ импульсов на выходе и, в конечном итоге, используется для регулирования скорости подключенного двигателя.
Переключатель S1 используется для мгновенного изменения направления вращения двигателя, когда это необходимо.
Список деталей
- R1, R2, R6 = 1K,
- R3 = 150K,
- R4, R5 = 150 Ом,
- R7, R8, R9, R10 = 470 Ом,
- C1 = 0,1 мкФ,
- C2, C3 = 0,01 мкФ,
- C4 = 1 мкФ / 25VT1,
- T2 = TIP122,
- T3, T4 = TIP127
- T5 = BC557,
- T6, T7 = BC547,
- D1 — D4 = 1N5408,
- Z1 = 4V7 400 мВт
- IC1 = 556,
- S1 = Тумблер SPDT
Приведенная выше схема была вдохновлена следующей схемой драйвера двигателя, которая давно была опубликована в журнале Elecktor Electronic India.
Управление крутящим моментом двигателя с помощью IC 555
Первую схему управления двигателем можно значительно упростить, если использовать DPDT-переключатель для реверсирования двигателя и транзистор эмиттерного повторителя для реализации управления скоростью, как показано ниже:
Улучшено Крутящий момент на низкой скорости с использованием управления CMOS PWM
Хотя схемы контроллера скорости линейного двигателя с одним полевым МОП-транзистором, описанные в начале статьи, включают преимущество простоты, но они могут иметь несколько недостатков. Одна из них заключается в том, что в полевом МОП-транзисторе существует значительный уровень рассеивания, особенно когда двигатель настроен примерно на 50 процентов от оптимальной скорости. Однако это может быть, конечно, не серьезной проблемой, и просто требуется установка радиатора умеренно большого размера на полевой МОП-транзистор.
Одна из них заключается в том, что в полевом МОП-транзисторе существует значительный уровень рассеивания, особенно когда двигатель настроен примерно на 50 процентов от оптимальной скорости. Однако это может быть, конечно, не серьезной проблемой, и просто требуется установка радиатора умеренно большого размера на полевой МОП-транзистор.
Гораздо более серьезная проблема заключается в том, что двигатель может заглохнуть, как только этот тип линейного регулятора настроен на более низкие скорости. Это связано с тем, что полевой МОП-транзистор в этой ситуации имеет относительно высокое сопротивление, что обеспечивает вход питания со значительно высоким выходным сопротивлением.
Когда нагрузка на двигатель увеличивается, он пытается потреблять чрезмерное количество тока питания, но это приводит к большему падению напряжения на транзисторе и более низкому напряжению питания на двигателе. В результате мощность, подаваемая на двигатель, существенно не меняется, а скорее уменьшается.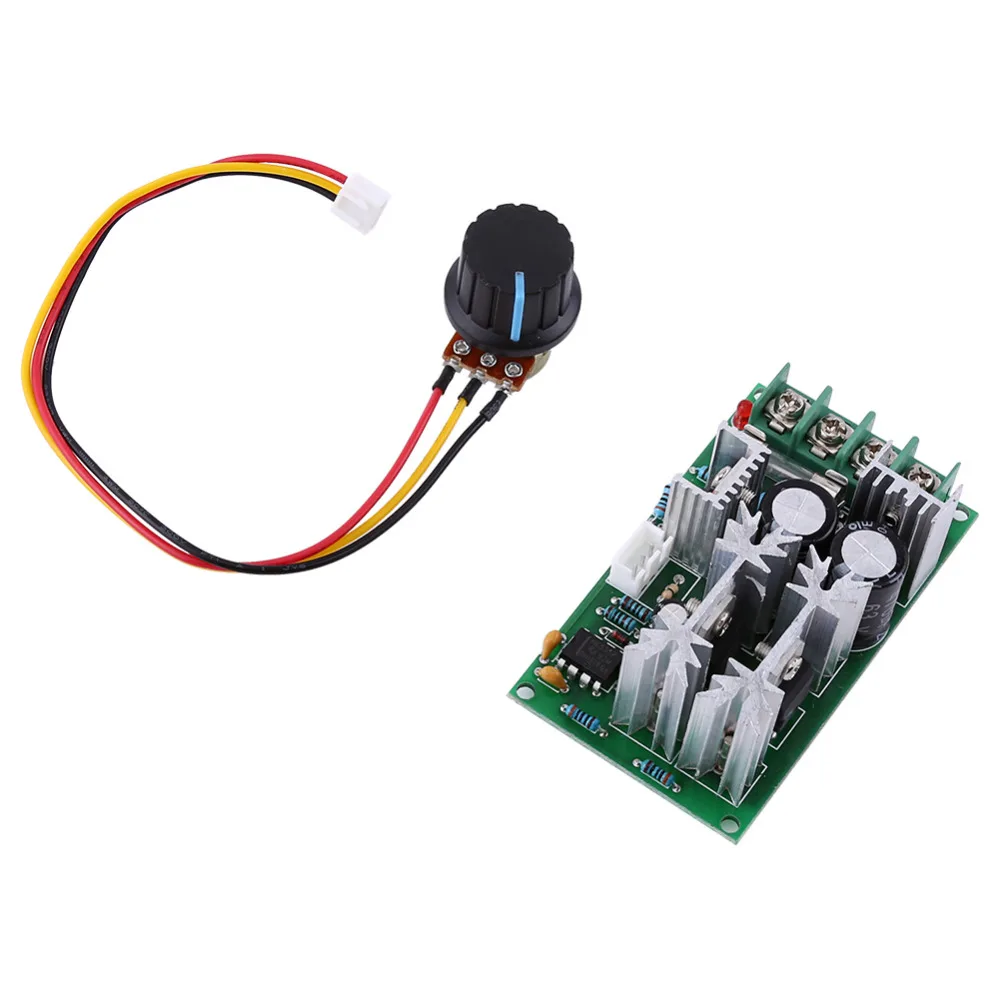 Из-за этого мотор имеет склонность к заглоханию. Кроме того, существует обратная реакция, при которой снижение нагрузки на двигатель снижает потребление тока, что приводит к увеличению напряжения питания и значительному увеличению скорости двигателя.
Из-за этого мотор имеет склонность к заглоханию. Кроме того, существует обратная реакция, при которой снижение нагрузки на двигатель снижает потребление тока, что приводит к увеличению напряжения питания и значительному увеличению скорости двигателя.
Используя контроллер, который подает импульсный сигнал ШИМ на двигатель, вы можете добиться гораздо лучшего управления скоростью двигателя.
Улучшенный крутящий момент с использованием управления скоростью CMOS PWM
Один из способов реализации этого, и тот, который используется здесь, состоит в том, чтобы иметь схему, которая обеспечивает фиксированную длительность выходного импульса при изменении частоты импульсов для изменения скорости двигателя. Низкая частота создает большие промежутки между импульсами и подает на двигатель относительно небольшую мощность.
При увеличении частоты нет заметных промежутков между импульсами, и двигатель получает почти постоянный сигнал.Это приводит к высокой средней мощности двигателя, который работает на полной скорости. Преимущество этой системы заключается в том, что когда двигатель работает в импульсном режиме, он по существу получает полную мощность во время периодов включения импульсов и может свободно потреблять большой ток питания, если нагрузка на двигатель действительно требует этого.
В результате двигатель приводится в действие последовательностью сильных импульсов, которые предотвращают остановку и обеспечивают улучшенный крутящий момент даже при пониженных скоростях.
На следующем рисунке изображена принципиальная схема импульсного управления скоростью двигателя постоянного тока.Здесь T1, D1, D2 и C1 получают достаточное питание постоянного тока от сети переменного тока. Tr1 подключен последовательно с двигателем, но его клемма затвора принимает выходной сигнал от нестабильной схемы мультивибратора.
Эта схема ШИМ построена с использованием двух из четырех вентилей устройства CMOS 4001, которые используются в нестабильной схеме CMOS, которая представляет собой вполне обычную конструкцию.
Можно увидеть пару синхронизирующих резисторов, подключенных между выходом затвора 1 и переходом R1 и C2, что отличается от традиционной конструкции ШИМ.VR1 и R2 — это два резистора вместе с направляющими диодами D3 и D4, подключенными последовательно с выходом логического элемента И-НЕ 1.
Два диода гарантируют, что R2 работает как синхронизирующее сопротивление всякий раз, когда на выходе нестабильного устройства высокий уровень, а VR1 функционирует как временное сопротивление, когда выход низкий.
Период выходных импульсов постоянен, поскольку R2 имеет заданное значение. Интервал между ними можно было изменить, варьируя VR1. Это будет почти нулевое значение при настройке на самое низкое сопротивление.Расстояние между метками вывода больше десяти к одному при максимальном сопротивлении.
VR1, следовательно, можно отрегулировать для создания желаемой скорости двигателя с эффективным крутящим моментом, при этом самая низкая скорость достигается при полном сопротивлении, а самая высокая скорость — при нулевом сопротивлении.
Прецизионное управление двигателем с использованием одного операционного усилителя
Чрезвычайно тонкое или сложное управление постоянным током. Двигатель может быть реализован с использованием операционного усилителя и тахогенератора. Операционный усилитель выполнен в виде переключателя, чувствительного к напряжению.В схеме, показанной ниже, как только выходная мощность тахогенератора становится ниже, чем заданное опорное напряжение, переключающий транзистор включается, и на двигатель подается 100% мощность.
Переключение операционного усилителя произойдет всего за пару милливольт от опорного напряжения. Вам понадобится двойной источник питания, который может быть просто стабилитроном.
Этот контроллер мотора обеспечивает плавную регулировку диапазона без каких-либо механических проблем.
Выходной сигнал операционного усилителя составляет всего +/- 10% от уровня шин питания, таким образом, используя двойной эмиттерный повторитель, можно контролировать огромные скорости двигателя.
Опорное напряжение может быть зафиксировано с помощью термисторов или LDR и т. Д. Экспериментальная установка, указанная на принципиальной схеме, использовала операционный усилитель RCA 3047A и двигатель мощностью 0,25 Вт 6 В в качестве тахогенератора, который генерировал около 4 В при 13000. об / мин для предполагаемой обратной связи.
Дополнительные схемы :
ШИМ-управление двигателем с использованием только BJT
Следующая схема также использует принцип ШИМ для желаемого управления скоростью двигателя, однако он не зависит от каких-либо интегральных схем или IC, а использует только обычные BJT. для реализации.Я взял это со страницы старого журнала.
Цепи управления двигателем с использованием LM3524
IC LM3524 — это специализированная схема ШИМ-контроллера, которая позволяет нам конфигурировать очень полезные и точные схемы управления скоростью двигателя, как описано ниже:
На приведенной выше диаграмме показана базовая схема управления ШИМ-двигателем с использованием IC LM3524. Конструкция дополнительно включает управление обратной связью на основе датчика через микросхему LM2907.
Конструкция дополнительно включает управление обратной связью на основе датчика через микросхему LM2907.
К валу двигателя прикреплен небольшой магнит, так что во время вращения магнит проходит вплотную к трансформатору со считывающей катушкой с железным сердечником.Этот механизм заставляет вращающийся магнит индуцировать резкий электрический импульс в считывающей катушке, который используется LM2907 в качестве триггерного входа и соответствующим образом обрабатывается как импульс управления обратной связью для LM3524 IC.
Система обратной связи гарантирует, что заданная скорость никогда не может отклоняться от заданной, обеспечивая точное управление скоростью. Гнездо на штыре № 2 LM3524 используется для управления скоростью двигателя.
Бездатчиковое управление, без обратной ЭДС двигателя
Следующая конструкция ШИМ-управления скоростью LM3525 позволяет осуществлять управление с обратной связью без включения сложного механизма тахометра или громоздких датчиков, реализованных в предыдущей конструкции.
Здесь обратная ЭДС двигателя используется в качестве сигнала обратной связи и подается на вход IC LF198. В случае, если скорость имеет тенденцию к превышению установленного уровня, LF198 сравнивает нарастающий сигнал ЭДС с эталонным сигналом выборки с выхода LM393. Результирующий выходной сигнал отправляется в усилитель ошибки микросхемы LM3524 для необходимой обработки выходного ШИМ на транзисторы драйвера. Контролируемый ШИМ благодаря этой обратной связи без датчика через обратную ЭДС, в конечном итоге, позволяет двигателю оставаться точно зафиксированным на правильной скорости, которая регулируется потенциометром на контакте №2.
ШИМ-регулятор скорости двигателя / диммер постоянного тока
ШИМ-регулятор скорости двигателя / диммер постоянного тока(C) 1999, Дж. Форрест Кук
Защитите этот проект от солнечного света с помощью CirKits комплект цепи солнечной энергии.
Детали
U1: Счетверенный операционный усилитель LM324N U2: 78L12 регулятор 12 вольт Q1: IRF521 N-канальный МОП-транзистор D1: кремниевый диод 1N4004 LED1 Красный светодиод C1: керамический дисковый конденсатор 0,01 мкФ, 25 В С2-С5: 0.
Широтно-импульсный модулятор для приложений 12 и 24 В
Эта схема была представлена в статье в журнале Home Power Magazine №75
(C) Дж. Форрест Кук 1999.
Введение
Широтно-импульсный модулятор (ШИМ) — это устройство, которое может использоваться в качестве
эффективный светорегулятор или регулятор скорости двигателя постоянного тока.Схема описанная
вот для устройства общего назначения, которое может управлять устройствами постоянного тока, которые рисуют
до нескольких ампер тока.
Схема может использоваться как в 12, так и в 24-вольтовых системах только с несколькими
мелкие изменения проводки. Это устройство использовалось для управления яркостью
автомобильного заднего фонаря и в качестве регулятора скорости двигателя для небольших вентиляторов постоянного тока
тип, используемый в компьютерных блоках питания.
Схема PWM работает, делая прямоугольная волна с переменным отношением включения / выключения, среднее по времени может быть варьировались от 0 до 100 процентов.Таким образом, переменное количество мощности передается в нагрузку. Главное преимущество схемы ШИМ перед резистивный регулятор мощности — это КПД, на уровне 50% ШИМ будет использовать около 50% полной мощности, почти вся она передается на нагрузку, резистивный контроллер при 50% мощности нагрузки потребляет около 71% полной мощности, 50% мощности идет на нагрузку, а оставшийся 21% расходуется на нагрев последовательный резистор. Эффективность нагрузки почти всегда является критическим фактором в солнечной энергии и других устройствах. альтернативные энергетические системы.
Еще одно преимущество широтно-импульсной модуляции
состоит в том, что импульсы достигают полного напряжения питания и производят больше
крутящий момент в двигателе за счет способности преодолевать внутренние сопротивления двигателя
легче. Наконец, в схеме ШИМ обычные небольшие потенциометры могут быть
используется для управления широким спектром нагрузок, в то время как большие и дорогие, с высокой мощностью
переменные резисторы нужны для резистивных контроллеров.
Наконец, в схеме ШИМ обычные небольшие потенциометры могут быть
используется для управления широким спектром нагрузок, в то время как большие и дорогие, с высокой мощностью
переменные резисторы нужны для резистивных контроллеров.
Основными недостатками схем ШИМ являются добавленная сложность и
возможность генерации радиопомех (RFI).RFI может быть
минимизировать за счет размещения контроллера рядом с нагрузкой с использованием коротких проводов,
а в некоторых случаях — использование дополнительной фильтрации на выводах источника питания.
Эта схема имеет некоторый обход радиопомех и создает минимальные помехи для
AM-радио, которое находилось в полуметре от меня. Если дополнительная фильтрация
При необходимости дроссель автомобильной радиолинии может быть включен последовательно с источником питания постоянного тока.
входного сигнала, убедитесь, что не превышен номинальный ток дросселя.
Большинство радиопомех будет исходить от сильноточного пути, включающего
источник питания, нагрузка и переключающий полевой транзистор Q1.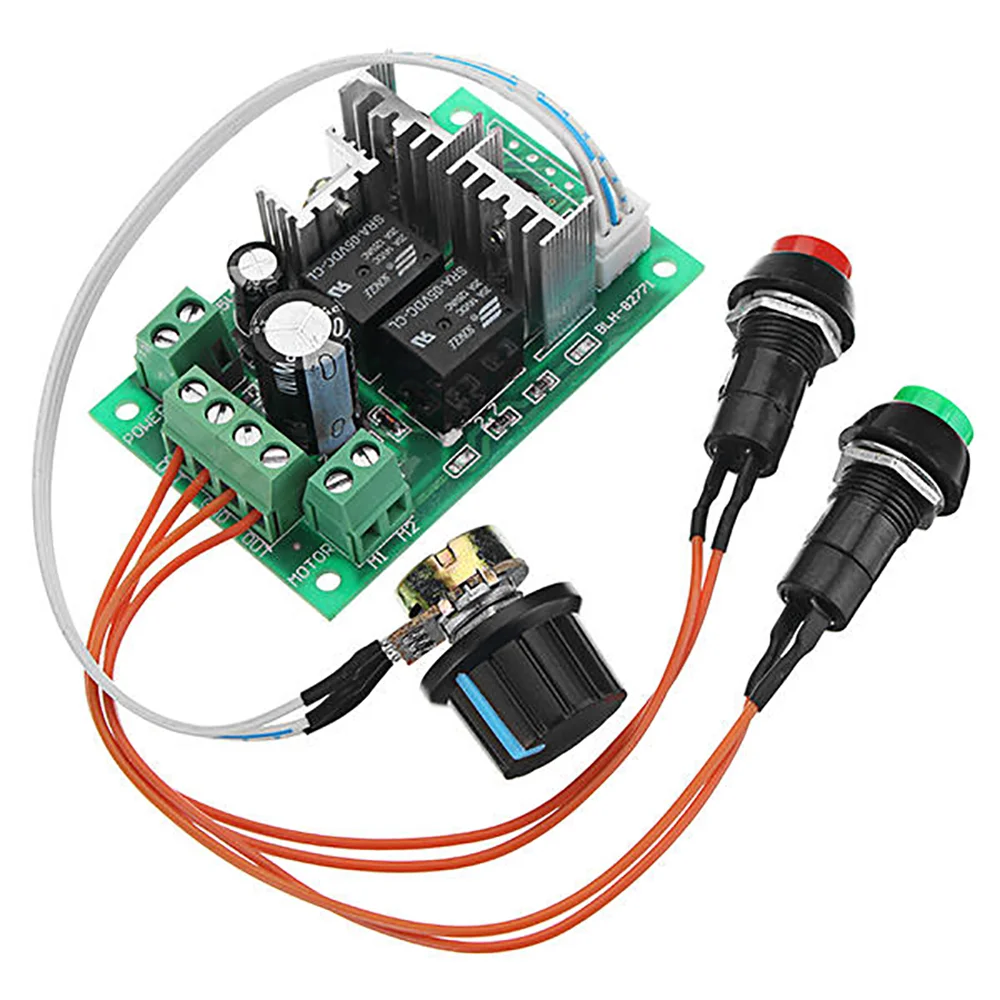
Технические характеристики
Частота ШИМ: 400 Гц Номинальный ток: 3 А с полевым транзистором IRF521,> 10 А с полевым транзистором IRFZ34N и радиатором Ток цепи ШИМ: 1,5 мА при 12 В без светодиода и без нагрузки Рабочее напряжение: 12 В или 24 В в зависимости от конфигурации
Теория
Схема ШИМ требует для работы стабильно работающего генератора. U1a и U1d образуют генератор сигналов прямоугольной / треугольной формы с частотой около 400 Гц. U1a действует как компаратор с гистерезисом, а U2d действует как инвертирующий интегратор, который возвращается к U1a.Вместе они производят прямоугольные и треугольные волновые сигналы. Резистор R4 и конденсатор C1 задают частоту генератора.
U1c используется для генерации опорного напряжения 6 В, которое используется в качестве виртуального заземление для генератора, это позволяет генератору работать от одного источник питания вместо двойного источника питания +/-.
U1b подключен в конфигурации компаратора и является частью
схема, генерирующая переменную ширину импульса. Контакт 6 U1 получает
переменное напряжение от лестницы напряжения R6, VR1, R7.Это сравнивается
к треугольной форме волны от U1-14. Когда форма волны выше контакта 6
напряжение, U1 обеспечивает высокий выходной сигнал. И наоборот, когда форма волны ниже
напряжение на выводе 6, U1 дает низкий выходной сигнал. Изменяя напряжение на контакте 6,
точки включения / выключения перемещаются вверх и вниз по треугольной волне, создавая
переменная ширина импульса. Резисторы R6 и R7 используются для установки конечных точек.
элемента управления VR1, показанные значения позволяют полностью включить элемент управления.
и полное отключение в пределах хода потенциометра.Эти
значения детали могут быть изменены, чтобы изменить поведение потенциометра.
Контакт 6 U1 получает
переменное напряжение от лестницы напряжения R6, VR1, R7.Это сравнивается
к треугольной форме волны от U1-14. Когда форма волны выше контакта 6
напряжение, U1 обеспечивает высокий выходной сигнал. И наоборот, когда форма волны ниже
напряжение на выводе 6, U1 дает низкий выходной сигнал. Изменяя напряжение на контакте 6,
точки включения / выключения перемещаются вверх и вниз по треугольной волне, создавая
переменная ширина импульса. Резисторы R6 и R7 используются для установки конечных точек.
элемента управления VR1, показанные значения позволяют полностью включить элемент управления.
и полное отключение в пределах хода потенциометра.Эти
значения детали могут быть изменены, чтобы изменить поведение потенциометра.
Наконец, Q1 — переключатель мощности, он принимает модулированную ширину импульса.
напряжение на зажиме затвора и включает и выключает ток нагрузки
через текущий путь Источник-Сток. Когда Q1 включен, он обеспечивает
путь заземления для нагрузки, когда Q1 выключен, заземление нагрузки плавающее. Следует позаботиться о том, чтобы клеммы нагрузки не были заземлены.
или произойдет короткое замыкание.
Следует позаботиться о том, чтобы клеммы нагрузки не были заземлены.
или произойдет короткое замыкание.
Нагрузка всегда будет иметь положительное напряжение питания.LED1 дает переменную яркость в зависимости от ширины импульса. Конденсатор C3 сглаживает форму волны переключения и устраняет некоторые радиопомехи, диод. D1 — это диод маховика, который замыкает удар обратного напряжения от индуктивные двигательные нагрузки.
В режиме 24 В регулятор U2 преобразует подачу 24 В в 12 В для управляя схемой ШИМ, Q1 переключает нагрузку 24 В на землю точно так же делает для нагрузки 12 В. См. Схему для получения инструкций по подключению цепь на 12 Вольт или 24 Вольта.
При работе с нагрузкой 1 ампер или меньше радиатор на Q1 не требуется,
если вы планируете переключать больше тока, радиатор с термопастой
необходимый. Q1 может быть заменен более мощным устройством, подходящими обновлениями
включают IRFZ34N, IRFZ44N или IRFZ48N. Все о текущем обращении
устройств, выключателя S1, предохранителя F1 и проводки между полевым транзистором, источником питания,
и нагрузка должна быть рассчитана на максимальный ток нагрузки.
Строительство
Первый прототип этой схемы был построен на макетной плате IC. с деталями и проводами, вставленными в отверстия макетной платы.Одна версия готовой схемы использовалась для создания регулируемой скорости Вентилятор постоянного тока, вентилятор был установлен на небольшой металлической коробке, а Схема ШИМ находилась внутри коробки.
Простая печатная плата (см. Рисунок) была построена с использованием бесплатного
Программа CAD для печатной платы, PCB (1), работающая в операционной системе Linux.
Изображение печатной платы было напечатано на лазерном принтере PostScript на
средство для переноса маски под названием синяя пленка Techniks Press-n-Peel (2).
Печатная пленка приутюживается на очищенном куске односторонней меди.
облицованная доска.Плата протравлена раствором хлористого железа.
Отверстия просверливаются сверлом с мелким калибром, детали впаиваются, а
Плата подключена к питанию и нагрузке. Эта техника отлично подходит для изготовления
рабочие доски в короткие сроки, но не подходят для изготовления больших чисел
досок. Рисунок платы показан на рис. 3, его можно скопировать на кусок
синей пленки Press-n-peel или используется в процессе фотографического травления.
Рисунок платы показан на рис. 3, его можно скопировать на кусок
синей пленки Press-n-peel или используется в процессе фотографического травления.
В качестве альтернативы можно использовать метод построения мертвого жучка.Это включает берем кусок пустой медной печатной платы, приклеиваем сбоку гнездо для микросхемы. на плату 5 минут эпоксидной смолой, затем припаять все части к проводу оберните булавки. Заземленные контакты можно припаять прямо к медной плате.
Перед подачей питания рекомендуется очень внимательно проверить проводку. первый раз. Ошибки подключения могут вызвать мгновенное разрушение чувствительные полупроводниковые компоненты.
Выравнивание
Согласование с этой схемой не требуется.
Используйте
Эта схема будет работать как диммер лампы постоянного тока, небольшой контроллер двигателя и даже
как небольшой контроллер отопителя. Это было бы отличным контролем скорости для солнечной
приводной электропоезд. Схема была опробована с электрическим током на 5 ампер.
двигатель использует IRFZ34N FET и работал нормально, возможно, потребуется замена D1
с более быстрым и более мощным диодом с некоторыми двигателями.
Схема должна работать в таких приложениях, как велосипед.
система моторного привода, если вы поэкспериментируете с этим, обязательно включите
легкодоступный аварийный выключатель питания на случай короткого замыкания полевого транзистора
выходит и оставляет схему включенной.
Схема была опробована с электрическим током на 5 ампер.
двигатель использует IRFZ34N FET и работал нормально, возможно, потребуется замена D1
с более быстрым и более мощным диодом с некоторыми двигателями.
Схема должна работать в таких приложениях, как велосипед.
система моторного привода, если вы поэкспериментируете с этим, обязательно включите
легкодоступный аварийный выключатель питания на случай короткого замыкания полевого транзистора
выходит и оставляет схему включенной.
Подключите цепь на 12 В или 24 В в соответствии со схемой, подключите Аккумулятор к входным клеммам и подключите нагрузку к выходу клеммы, убедитесь, что не заземлены ни выходные клеммы, ни что-либо подключенное к выходным клеммам, например, к корпусу двигателя. Поверните ручку потенциометра вперед и назад, груз должен показывать переменную скорость или свет.
Ресурсы
Jameco 1-800-831-4242 http://www.jameco.com/ Digi-Key 1-800-DIGIKEY http: // www.digikey.com/ (1) Бесплатное программное обеспечение для печатных плат для Linux (2) Techniks, Inc P.
 O. Box 463 Ringoes, NJ 08551 908-788-8249 Press-N-Peel
O. Box 463 Ringoes, NJ 08551 908-788-8249 Press-N-Peel
Печатная схема
Изображение печатной платы PWM в Формат GIF И в Формат PostScript
ШИМ детали шелкографии в Формат GIF И в Формат PostScript
Пояснения к шелкографии: немаркированный круговой узор возле светодиода LED1 проволочная перемычка и часть с надписью FB1 на самом деле R9.
Подключения 8-контактного разъема на печатной плате: следующее:
Макет заголовка как ориентированный в оформлении печатной платы: 7 5 3 1 8 6 4 2 1: VR1 по часовой стрелке 2: VR1 против часовой стрелки 3: 12 В питание + и нагрузка + 4: Стеклоочиститель VR1 5: 12 В питание + и нагрузка + 6: Питание 12 В - 7: Нагрузка - 8: Питание 12 В -
Увидеть вариации этой схемы для получения дополнительных идей.
Назад на страницу FC PWM Circuits.
Подробное описание контроллеров двигателей с ШИМ — документация конкурса FIRST Robotics Competition
Подсказка
WPILib имеет обширную поддержку управления двигателем. Существует ряд классов, которые представляют различные типы контроллеров двигателей и сервоприводов. В настоящее время существует два класса контроллеров двигателей: контроллеры двигателей на основе ШИМ и контроллеры двигателей на основе CAN. WPILib также содержит составные классы (например, DifferentialDrive), которые позволяют управлять несколькими двигателями с помощью одного объекта.В этой статье будут рассмотрены детали контроллеров двигателей с ШИМ; Контроллеры CAN и составные классы будут рассмотрены в отдельных статьях.
Существует ряд классов, которые представляют различные типы контроллеров двигателей и сервоприводов. В настоящее время существует два класса контроллеров двигателей: контроллеры двигателей на основе ШИМ и контроллеры двигателей на основе CAN. WPILib также содержит составные классы (например, DifferentialDrive), которые позволяют управлять несколькими двигателями с помощью одного объекта.В этой статье будут рассмотрены детали контроллеров двигателей с ШИМ; Контроллеры CAN и составные классы будут рассмотрены в отдельных статьях.
ШИМ-контроллеры, краткая теория работы
Аббревиатура PWM означает широтно-импульсную модуляцию. Для контроллеров двигателей ШИМ может относиться как к входному сигналу, так и к методу, который контроллер использует для управления скоростью двигателя. Для управления скоростью двигателя контроллер должен изменять воспринимаемое входное напряжение двигателя. Для этого контроллер очень быстро включает и выключает полное входное напряжение, изменяя время нахождения в зависимости от управляющего сигнала. Из-за механических и электрических постоянных времени типов двигателей, используемых в FRC®, это быстрое переключение дает эффект, эквивалентный приложению фиксированного более низкого напряжения (переключение 50% дает тот же эффект, что и приложение ~ 6 В).
Из-за механических и электрических постоянных времени типов двигателей, используемых в FRC®, это быстрое переключение дает эффект, эквивалентный приложению фиксированного более низкого напряжения (переключение 50% дает тот же эффект, что и приложение ~ 6 В).
Сигнал ШИМ, который контроллеры используют для входа, немного отличается. Даже в границах диапазона сигнала (максимальное прямое или максимальное обратное) сигнал никогда не приближается к скважности 0% или 100%. Вместо этого контроллеры используют сигнал с периодом 5 мс или 10 мс и средней шириной импульса 1.5 мс. Многие из контроллеров используют типичную синхронизацию контроллера дистанционного управления от 1 мс до 2 мс.
Исходные и масштабированные выходные значения
В общем, все классы контроллеров мотора в WPILib принимают масштабированное значение от -1,0 до 1,0 в качестве выходного сигнала для привода. Модуль PWM в FPGA на roboRIO способен генерировать сигналы PWM с периодами 5, 10 или 20 мс и может изменять ширину импульса с 2000 шагов по ~ 0,001 мс каждый около средней точки (1000 шагов в каждом направлении вокруг средней точки. ).Необработанные значения, отправляемые в этот модуль, находятся в диапазоне от 0 до 2000, где 0 — это особый случай, когда сигнал удерживается на низком уровне (отключен). Класс для каждого контроллера мотора содержит информацию о типичных граничных значениях (мин., Макс. И каждая сторона зоны нечувствительности), а также о типичной средней точке. Затем WPILib может использовать эти значения для отображения масштабированного значения в правильный диапазон для контроллера мотора. Это позволяет коду плавно переключаться между различными типами контроллеров и абстрагировать детали конкретной сигнализации.
).Необработанные значения, отправляемые в этот модуль, находятся в диапазоне от 0 до 2000, где 0 — это особый случай, когда сигнал удерживается на низком уровне (отключен). Класс для каждого контроллера мотора содержит информацию о типичных граничных значениях (мин., Макс. И каждая сторона зоны нечувствительности), а также о типичной средней точке. Затем WPILib может использовать эти значения для отображения масштабированного значения в правильный диапазон для контроллера мотора. Это позволяет коду плавно переключаться между различными типами контроллеров и абстрагировать детали конкретной сигнализации.
Калибровка контроллеров двигателей
Итак, если WPILib выполняет все это масштабирование, зачем вам когда-либо калибровать контроллер мотора? Значения, которые WPILib использует для масштабирования, являются приблизительными и основаны на измерении количества выборок каждого типа контроллера. Из-за множества факторов синхронизация отдельного контроллера мотора может незначительно отличаться. Чтобы окончательно устранить «гудение» (сигнал средней точки, интерпретируемый как легкое движение в одном направлении) и довести контроллер до каждого крайнего положения, по-прежнему рекомендуется откалибровать контроллеры.В общем, процедура калибровки для каждого контроллера включает в себя перевод контроллера в режим калибровки, затем перевод входного сигнала в каждый крайний предел, а затем обратно в среднюю точку. Примеры использования этих контроллеров двигателей в коде см. В разделе Использование контроллеров двигателей в коде / Использование контроллеров двигателей с ШИМ
Чтобы окончательно устранить «гудение» (сигнал средней точки, интерпретируемый как легкое движение в одном направлении) и довести контроллер до каждого крайнего положения, по-прежнему рекомендуется откалибровать контроллеры.В общем, процедура калибровки для каждого контроллера включает в себя перевод контроллера в режим калибровки, затем перевод входного сигнала в каждый крайний предел, а затем обратно в среднюю точку. Примеры использования этих контроллеров двигателей в коде см. В разделе Использование контроллеров двигателей в коде / Использование контроллеров двигателей с ШИМ
, контроллер постоянного тока DC10 ~ -50 В 3000 Вт 60A Регулятор скорости / плата управления двигателем постоянного тока / регулятор освещенности / регулятор нагревателя / регулятор PWM
Плата управления скоростью двигателя, контроллер постоянного тока DC10 ~ -50V 3000W 60A Регулятор скорости / плата управления двигателем постоянного тока / регулятор освещенности / регулятор нагревателя / регулятор PWM
Параметры:
- Рабочее напряжение: DC10 ~ -50V
- Управляющая мощность: 0. 01 ~ 3000 Вт
- Макс. Номинальный ток: 60A
- Различное рабочее напряжение, соответствующее разной мощности управления:
- 12 В: 12 В * 60 А = 720 Вт
- 24 В: 24 В * 60 А = 1440 Вт
- 36 В: 36 В * 60 А = 2160 Вт
- 40 В: 40 В * 60 А = 2400 Вт
- 50 В: 50 В * 60 А = 3000 Вт
- Ток покоя: 0,04 А (при рабочем напряжении от 10 В до 50 В, ток покоя не превышает 40 мА)
- Коэффициент заполнения ШИМ: 5% -100%
- Частота ШИМ: 15 кГц
- Рабочая температура: -20 ° c ~ 40 ° c
Применения:
- Универсальная регулировка скорости двигателя щетки постоянного тока.
- Регулировка скорости двигателя автомобиля (легковой регулировка скорости вентилятора охлаждения, регулировка скорости вентилятора автомобиля, автомобиль регулировка скорости мотора лобового стекла, скорость вентилятора кондиционера автомобиля регулирования)
- Скорость конвейерной ленты производственной линии
регулировка, регулировка скорости вытяжного вентилятора, регулировка скорости беговой дорожки,
параллельное регулирование скорости нескольких компьютерных вентиляторов, электронная скорость вентилятора
регулирование.
- Диммер постоянного тока, закалка нагревателя постоянного тока.

В коплект входит:
- Наличие: В наличии
- Модель: 2001712013
- Вес: 0.15 кг
- Размеры: 10,00см x 10,00см x 10,00см
- Артикул: 2001712013
