Как управлять вентилятором — chipenable.ru
Компактные электрические вентиляторы, благодаря невысокой цене, используются для охлаждения оборудования уже больше полувека. Тем не менее только в последние годы технологии управления вентиляторами стали значительно развиваться. В этой статье описано как и почему это развитие имело место быть и предложены некоторые полезные решения для разработчиков.
Один из трендов электроники — это создание компактных устройств, обладающих богатой функциональностью. Поэтому большинство электронных компонентов приобретают все меньшие размеры. Один из очевидных примеров — современные ноутбуки. Толщина и вес ноутбуков значительно уменьшается, но потребляемая мощность остается прежней или увеличивается. Другой пример — проекционные системы и телевизионные ресиверы.
В ноутбуках большая часть тепла выделяется процессором, в проекторе — источником света. Это тепло необходимо бесшумно и эффективно удалять из системы. Самый тихий способ избавления от тепла — это использование пассивных охлаждающих компонентов, таких как радиаторы или тепловые трубки.
Другой способ удаления тепла — это активное охлаждение с использованием вентиляторов, создающих поток воздуха вокруг нагревающихся компонентов. Однако вентилятор являются источником шума и, кроме того, увеличивает суммарное энергопотребление устройства, что может быть критично при питании от аккумулятора. Также добавление вентилятора увеличивает количество механических компонентов в системе, что отрицательно сказывается на надежности изделия.
Контроль скорости вращения вентилятора позволяет уменьшить описанные недостатки. Поскольку запуск вентилятора на меньших оборотах снижает шум и энергопотребление и увеличивает срок его службы.
Существует несколько типов вентиляторов и способов их контроля. Один из вариантов классификации вентиляторов может быть таким:
1. 2-х проводные вентиляторы
2. 3-х проводные вентиляторы
3. 4-х проводные вентиляторы
Методы управления вентиляторами, обсуждаемые в этой статье, такие:
1.
2. on/ff управление
3. линейное управление
4. низкочастотная широтно-импульсная модуляция (ШИМ, PWM)
5. высокочастотное управление
2-х проводные вентиляторы имеют только выводы питания — плюс и земля. В 3-х проводных вентиляторах добавляется тахометрический выход. На этом выходе присутствует сигнал, частота которого пропорциональна скорости вращения вентилятора. 4-х проводные вентиляторы, помимо выводов питания и тахометрического выхода, имеют вход управления. На этот вход подается ШИМ сигнал и ширина импульса этого сигнала определяет скорость вращения вентилятора.
2-х проводными вентиляторами можно управлять регулируя напряжение питания или скважность ШИМ сигнала. Однако без тахометрического сигнала невозможно понять на сколько быстро вентилятор вращается. Такая форма управления скоростью вращения вентилятора называется открытым контуром (open-loop).
3-х проводными вентиляторами можно управлять аналогичным образом, но в этом случае у нас есть обратная связь. Можно анализировать тахосигнал и устанавливать требуемую скорость. Такая форма управления называется закрытым контуром (closed-loop).
Можно анализировать тахосигнал и устанавливать требуемую скорость. Такая форма управления называется закрытым контуром (closed-loop).
Если управлять вентилятором регулируя напряжение питания, тахосигнал будет иметь форму меандра. И в этом случае тахосигнал будет всегда валидным, пока на вентиляторе есть напряжение. Такой сигнал показан на рисунке 1 (ideal tach).
При управлении вентилятором с помощью ШИМ — ситуация сложнее. Тахометрический выход вентилятора обычно представляет собой открытый коллектор. Поэтому тахосигнал будет валидным только при наличии напряжения на вентиляторе (on фаза ШИМ сигнала), а при отсутствии (off фаза) он будет подтягиваться к высокому логическому уровню. Таким образом тахосигнал становится «порубленным» управляющим ШИМ сигналом и по нему уже нельзя достоверно определять скорость вращения. Этот сигнал показан на рисунке 1 (tach).
Рисунок 1. Идеальный тахосигнал и тахосигнал при внешнем ШИМ управлении.
Для решения данной проблемы, необходимо периодически включать вентилятор на такой отрезок времени, который позволит получить несколько достоверных циклов тахосигнала. Такой подход реализован в некоторых контроллерах фирмы Analog Device, например в ADM1031 и ADT7460.
Такой подход реализован в некоторых контроллерах фирмы Analog Device, например в ADM1031 и ADT7460.
4-х проводные вентиляторы имеют ШИМ вход, который управляет коммутацией обмоток вентилятора к плюсовой шине источника питания. Такая схема управления не портит тахосигнал, в отличии от стандартной, где используется внешний ключ и коммутируется отрицательная шина. Переключение обмоток вентилятора создает коммутационный шум. Чтобы «сдвинуть» этот шум за пределы звукового диапазона частоту ШИМ сигнала обычно выбирают больше 20 кГц.
Еще одно преимущество 4-х проводных вентиляторов — это возможность задания низкой скорости вращения — до 10% от максимальной скорости. На рисунке 2 показана разница между 3-х и 4-х проводными вентиляторами.
Рисунок 2. 3-х и 4-х проводные вентиляторы
Управление отсутствует
Простейший метод управления вентилятором — отсутствие какого-либо управления вообще. Вентилятор просто запускается на максимальной скорости и работает все время.
On/off управление
Следующий простейший метод управления — термостатический или on/off. В этом случае вентилятор включается только тогда, когда требуется охлаждение. Условие включения вентилятора устанавливает пользователь, обычно это какое-то пороговое значение температуры.
Подходящий датчик для on/off управления — это ADM1032. Он имеет выход THERM, который управляется внутренним компаратором. В нормальном состоянии на этом выходе высокий логический уровень, а при превышении порогового температурного значения он переключается на низкий. На рисунке 3 показан пример цепи с использованием ADM1032.
Рисунок 3. Пример on/off управления
Недостаток on/off контроля — это его ограниченность. При включении вентилятора, он запускается на максимальной скорости вращения и создает шум.
Линейное управление
При линейном управлении скорость вращения вентилятора изменяется за счет изменения напряжения питания. Для получения низких оборотов напряжение уменьшается, для получения высоких увеличивается. Конечно, есть определенные границы изменения напряжения питания.
Рассмотрим, например, вентилятор на 12 вольт. Для запуска ему требуется не меньше 7 В и при этом напряжении он, вероятно, будет вращаться с половинной скоростью от своего максимального значения. Когда вентилятор запущен, для поддержания вращения требуется уже меньшее напряжение. Чтобы замедлить вентилятор, мы можем понижать напряжение питание, но до определенного предела, допустим, до 4-х вольт, после чего вентилятор остановится. Эти значения будут отличаться в зависимости от производителя, модели вентилятора и конкретного экземпляра.
5-и вольтовые вентиляторы позволяют регулировать скорость вращения в еще меньшем диапазоне, поскольку их стартовое напряжение близко к 5 В. Это принципиальный недостаток данного метода.
Линейное управление вентилятором можно реализовать на микросхеме ADM1028. Она имеет управляющий аналоговый выход, интерфейс для подключения диодного температурного датчика, который обычно используется в процессорах и ПЛИС, и работает от напряжения 3 — 5.5 В. На рисунке 4 показан пример схемы для реализации линейного управления. Микросхема ADM1028 подключается ко входу DAC.
Рисунок 4. Схема для реализации линейного управления 12-и вольтового вентилятора
Линейный метод управления тише, чем предыдущие. Однако, как вы могли заметить, он обеспечивает маленький диапазон регулировки скорости вращения вентилятора. 12-и вольтовые вентиляторы при напряжении питания от 7 до 12 В, позволяют устанавливать скорость вращения от 1/2 от максимума до максимальной. 5-и вольтовые вентиляторы при запуске от 3,5 — 4 В, вращаются практически с максимальной скоростью и диапазон регулирования у них еще меньше.
Наиболее популярный метод управления скоростью вращения вентилятора — это ШИМ управление. При таком методе управления вентилятор подключается к минусой шине питания через ключ, а на управляющий вход ключа подается ШИМ сигнал. В данном случае к вентилятору всегда приложено либо нулевое, либо рабочее напряжение питания и не возникает таких энергопотерь, как при линейном методе управления. На рисунке 5 показана типовая схема реализующая ШИМ управление.
Рисунок 5. ШИМ управление.
Преимущество данного метода управления — простота реализации, дешевизна, эффективность и широкий диапазон регулирования скорости вращения. Однако недостатки у этого метода тоже есть.
Один из недостатков ШИМ управления — это «порча» тахосигнала. Этот недостаток можно устранить, используя так называемую pulse stretching технику, то есть удлиняя импульс ШИМ сигнала на несколько периодов тахосигнала. Конечно, при этом скорость вращения вентилятора может немного увеличится. На рисунке 6 показан пример.
Этот недостаток можно устранить, используя так называемую pulse stretching технику, то есть удлиняя импульс ШИМ сигнала на несколько периодов тахосигнала. Конечно, при этом скорость вращения вентилятора может немного увеличится. На рисунке 6 показан пример.
Рисунок 6. Удлинение импульса для получения информации о скорости вращения.
Другой недостаток ШИМ управления — это коммутационный шум. Во-первых коммутация индуктивной нагрузки вызывает появление помех в цепях питания, во-вторых может возникать акустический шум — пищание, жужжание. Электрические шумы подавляют фильтрами, а для борьбы с акустический шумом частоту ШИМ сигнала поднимают до 20 кГц.
Также стоит снова упомянуть о 4-х проводных вентиляторах, в которых схема управления уже встроена. В таких вентиляторах коммутируется плюсовая шина питания, что помогает избежать проблем с тахосигналом. Одна из микросхем, предназначенных для реализации ШИМ управления 4-х проводными вентиляторами, — это ADT7467. Условная схема приведена на рисунке 7.
Условная схема приведена на рисунке 7.
Рисунок 7. Схема ШИМ управления 4-х проводным вентилятором
Подводя итоги можно сказать, что наиболее предпочтительный метод управления вентилятором — это высокочастотное ШИМ управление, реализованное в 4-х проводных вентиляторах. При таком управлении отсутствует акустический шум, значительные энергопотери и проблемы с тахосигналом. Кроме того, он позволяет менять скорость вращения вентилятора в широком диапазоне. Схема ШИМ управления с коммутацией отрицательной шины обладает практически теми же достоинствами и является более дешевой, но портит тахосигнал.
По материалам фирмы AnalogDevices.
Зачем вентилятору четвёртый провод и как подключить 4 pin кулер
Распиновка вентилятора
Вентиляторы постоянного тока с четырьмя проводами (4 pin) имеют разноцветные провода, а компьютерные модели могут также иметь на конце разъем под материнскую плату. Для брэнда Sunon характерна следующая цветовая градация:
- Черный — земля (ноль), либо минус питания.

- Красный — плюс питания.
- Жёлтый провод — сигнальный, он выдает частоту оборотов двигателя. Как это происходит, смотрите, пожалуйста, статью и видео на нашем сайте.
- Синий провод — собственно является управляющим.

Распиновка компьютерных моделей с разъемом под матплату следующая:
- Черный — земля (ноль), либо минус питания.
- Жёлтый — плюс питания.
- Зеленый провод — сигнальный.
- Синий провод — управляющий.
Метод управления вентилятором
Управление четырех-проводного вентилятора осуществляется методом PWM (pulse-width modulation, он же ШИМ (Широтно-импульсная модуляция). В качестве управляющего сигнала чаще всего используется модулированный прямоугольный сигнал, как показано на рис.1.
Рис.1 Схема из спецификации на вентилятор. Пример прямоугольного управляющего сигнала.
Прямоугольный сигнал обладает рядом параметров, среди которых важнейшие:
- Амплитуда сигнала, измеряется в Вольтах.
- Частота сигнала, измеряется в Гц или кГц (эта величина обратно-пропорциональна периоду повторения)
- Коэффициент заполнения или заполняемость (по-английский Duty cycle), измеряется в безразмерных долях, либо в процентах.

Коэффициент заполнения (Duty cycle) — это отношение периода сигнала к его длительности, как показано на Рис 2. (скважность — это величина обратно-пропорциональная коэффициенту заполнения ).
В каких пределах следует генерировать управляющий сигнал?
Требования и ограничения на управляющий сигнал указываются в технической документации на конкретную модель вентилятора. Например, в соответствии со спецификацией, на Sunon PF80381B1-000U-S99 для управляющего сигнала установлены следующие ограничения:
- Амплитуда от 2 Вольт до 5.5 Вольт.
- Частота сигнала от 1 кГц до 100 кГц,
- Минимально допустимый коэффициент заполнения Duty 10%, ниже него вентилятор может полностью остановится.

Рис.2 Ограничения, указанные в спецификации на модель PF80381B1-000U-S99.
Ниже на видео демонстрируется то, как именно вентилятор реагирует на подачу управляющего прямоугольного сигнала с различными характеристиками. Используется универсальный генератор сигналов ATF20B, на котором в реальном режиме времени меняется коэффициент заполнения и, как следствие, наблюдаются изменения скорости вращения (а значит изменение мощности и производительности вентилятора).
Видео
В видео использован осевой вентилятор Sunon PF80381B1-000U-S99
Важно отметить следующие нюансы:
- При отсутствии какого-либо сигнала на синем проводе, когда провод «подвешен в воздухе», отрезан или заземлен — вентилятор работает на максимальной мощности .
- На вентилятор никак не влияет, ни частота управляющего сигнала, ни его амплитуда, а только коэффициент заполнения (Duty cycle). Но при этом, и частота и амплитуда управляющего сигнала должны соответствовать требованиям и ограничениям, указанным в технической документации на вентилятор.
- Реакция вентилятора на резкое изменение коэффициента заполнения в управляющем сигнале не мгновенная, а следует с некоторой задержкой (порядка 0.5 — 1 секунда).
 Но при этом, и частота и амплитуда управляющего сигнала должны соответствовать требованиям и ограничениям, указанным в технической документации на вентилятор.
Но при этом, и частота и амплитуда управляющего сигнала должны соответствовать требованиям и ограничениям, указанным в технической документации на вентилятор. Что такое скважность и как она соотносится с коэффициентом заполнения?
В России, для описания прямоугольного сигнала чаще пользуются не коэффициентом заполнения, а скважностью. Эти параметры имеют обратно пропорциональную зависимость, что показано на рисунке 3.
Рис. 3 Связь между скважностью и коэффициентом заполнения в прямоугольном сигнале.Управление кулером Linux | Losst
Читаете, вы, сейчас эти строки и слышите равномерный, в меру громкий шум кулера. Однозначно слышите, иначе вас бы не заинтересовала эта статья. На самом деле громкая работа кулера в Linux довольно частая проблема недавно перешедших с Windows-пользователей. А ведь он не должен так шуметь.
А ведь он не должен так шуметь.
В Windows, обороты вентилятора и многие другие параметры управляются автоматически в зависимости от нагрузки на систему и следовательно температуры оборудования, здесь же из коробки вентилятор всегда крутится на полную мощность, независимо от того, играете вы тяжелую игру, компилируете программу или просто просматриваете интернет страницы. Это нужно исправлять. В этой инструкции мы рассмотрим управление кулером Linux и настройку автоматической регуляции оборотов в зависимости от температуры.
Содержание статьи:
Подготовка системы
Чтобы правильно управлять и ничего не спалить, ну на самом деле и ничего не сгорит, компьютер просто уйдет в перезагрузку, но все же… нам нужно знать температуру оборудования в данный момент. Для снятия показаний со всяких датчиков на материнской плате используется набор программ lm_sensors. Сначала настроим lm_sensors затем управление кулером linux.
Установка lm_sensors
Это, можно сказать, системный компонент, поэтому он есть в репозиториях всех дистрибутивов.
Для Ubuntu или Debian команда установки выглядит следующим образом:
sudo apt install lm-sensors
Для Fedora и RHEL:
sudo yum installlm-sensors
Для Gentoo:
sudo emerge -av lm-sensors
Также для Gentoo в ядре необходимо будет включить следующие функции:
Device Drivers —>
-*- I2C support —>
<*> I2C device interface
<*> Hardware Monitoring support —>
//вообще говоря, лучше включить все драйвера оборудования а потом посмотреть какие загрузятся и отключить ненужные.
[M] Intel Core/Core2/Atom temperature sensor (coretemp)
Не забудьте пересобрать все пакеты с флагом lm_sensors
Настройка lm_sensors
Теперь нам нужно найти и записать информацию обо всех доступных сенсорах, для этого выполните:
sudo sensors-detect
После запуска команды нужно будет последовательно нажимать y, чтобы подтвердить сканирование следующей группы устройств, затем Enter:
Now follows a summary of the probes I have just done.
Just press ENTER to continue:
А потом опять y для сохранения собранной конфигурации в файл:
Do you want to overwrite /etc/conf.d/lm_sensors? Enter s to specify other file name?
(yes/NO/s):
Далее, добавляем сервис в автозагрузку:
sudo systemctl enable lm_sensors
Запускаем:
sudo systemctl start lm_sensors
Уже можем посмотреть показания сенсоров:
sensors
В зависимости от драйвера здесь показаны не только температура, но и обороты кулера, а также напряжение. Но это не главное, у нас есть информация и мы можем переходить к следующему пункту.
Управление кулером Linux
Управление оборотами вентилятора linux выполняется с помощью сервиса fancontrol. Для установки в Ubuntu:
sudo apt install fancontrol
В RedHat:
sudo yum install fancontrol
После установки переходим к настройке автоматического регулирования оборотов кулера. Сначала нужно программно связать каждый кулер с соответствующим ему датчиком температуры, и настроить допустимый уровень температур. Для этого выполните:
Сначала нужно программно связать каждый кулер с соответствующим ему датчиком температуры, и настроить допустимый уровень температур. Для этого выполните:
sudo pwmconfig
pwmconfig revision 6166 (2013-05-01)
This program will search your sensors for pulse width modulation (pwm)
controls, and test each one to see if it controls a fan on
your motherboard. Note that many motherboards do not have pwm
circuitry installed, even if your sensor chip supports pwm.
We will attempt to briefly stop each fan using the pwm controls.
The program will attempt to restore each fan to full speed
after testing. However, it is ** very important ** that you
physically verify that the fans have been to full speed
after the program has completed.
Сначала программа покажет доступные драйверы вентиляторов:
Found the following fan sensors:
hwmon1/device/fan1_input current speed: 3292 RPM
hwmon1/device/fan2_input current speed: 0 … skipping!
hwmon1/device/fan3_input current speed: 0 … skipping!
Здесь вы видите предупреждение о том что вентиляторы linux будут отключены на некоторое время (5 секунд), как прочитаете нажмите Enter. Дальше будет выполнено тестирование доступных скоростей кулера:
Дальше будет выполнено тестирование доступных скоростей кулера:
Testing pwm control hwmon1/device/pwm1 …
hwmon1/device/fan1_input … speed was 3292 now 1051
It appears that fan hwmon1/device/fan1_input
is controlled by pwm hwmon1/device/pwm1
Would you like to generate a detailed correlation (y)? y
Note: If you had gnuplot installed, I could generate a graphical plot.
PWM 255 FAN 3276
PWM 240 FAN 3169
PWM 225 FAN 3026
…
Дальше настроим максимальную, минимальную и рабочую температуры, сначала выберите кулер, например 1:
Select fan output to configure, or other action:
1) hwmon1/device/pwm3 3) Change INTERVAL 5) Save and quit
2) hwmon1/device/pwm1 4) Just quit 6) Show configuration
select (1-n): 1
Теперь выберите датчик температуры для этого кулера:
Devices:
hwmon0 is k10temp
hwmon1/device is it8712
Current temperature readings are as follows:
hwmon0/temp1_input 37
hwmon1/device/temp1_input 47
hwmon1/device/temp2_input 40
hwmon1/device/temp3_input -128
Select a temperature sensor as source for hwmon1/device/pwm3:
1) hwmon0/temp1_input
2) hwmon1/device/temp1_input
3) hwmon1/device/temp2_input
4) hwmon1/device/temp3_input
5) None (Do not affect this PWM output)
select (1-n): 1
Теперь укажите температуру, при которой вентилятор linux будет вращаться на минимальной скорости:
Enter the low temperature (degree C)
below which the fan should spin at minimum speed (20): 45
Затем температуру, при которой нужно переходить на максимальные обороты:
Enter the high temperature (degree C)
over which the fan should spin at maximum speed (60): 60
Далее, нужно указать минимальное значение оборотов pwm, можно узнать нажав кнопку t
Enter the minimum PWM value (0-255)
at which the fan STOPS spinning (press t to test) (100):2
Какое значение pwm использовать если температура превышает минимальную, по сути, это рабочие обороты:
Enter the PWM value (0-2) to use when the temperature
is below the low temperature limit 100
Какое значение использовать при превышении максимальной температуры:
Enter the PWM value (2-255) to use when the temperature
is over the high temperature limit (255): 255
Готово теперь, остается настроить таким же образом другие кулеры, если у вас их несколько и можно сохранять:
Select fan output to configure, or other action:
1) hwmon1/device/pwm3 3) Change INTERVAL 5) Save and quit
2) hwmon1/device/pwm1 4) Just quit 6) Show configuration
select (1-n): 5
Сохранить и выйти под номером 5. Добавте fancontrol в автозагрузку:
Добавте fancontrol в автозагрузку:
sudo systemctl enable fancontrol
И запустите:
sudo systemctl start fancontrol
Чувствуете? тишина… теперь fancontrol управляет вашими кулерами и шума без надобности больше не будет.
Ручное управление оборотами кулера
Меня всегда интересовало, как вручную выключить кулер. Сразу забегая на перед скажу, что ничего не сгорит, температура просто будет плавно расти. Если запущен fancontrol останавливаем, чтобы не мешал:
sudo systemctl stop fancontrol
Смотрим доступные устройства:
ls /sys/class/hwmon/hwmon1/device/ | grep pwm
Здесь pwm1, pwm2.. это файлы кулеров. Разрешаем ручное управление вентилятором linux, например, для pwm1:
echo 1 >>/sys/class/hwmon/hwmon1/device/pwm1_enable
Включаем на полную:
echo 255 >> /sys/class/hwmon/hwmon1/device/pwm1
А теперь на минимум:
echo 0 >> /sys/class/hwmon/hwmon1/device/pwm1
Выводы
Теперь вы достаточно знаете и управление кулером не вызовет у вас проблем. Вы можете заставить свой компьютер или ноутбук не шуметь и не мешать вам спать ночью. В современных системах это вовсе может не понадобится, там кулером управляет UEFI и не допускает того чтобы он крутился быстрее, чем это необходимо. Если остались вопросы, пишите их в комментариях!
Вы можете заставить свой компьютер или ноутбук не шуметь и не мешать вам спать ночью. В современных системах это вовсе может не понадобится, там кулером управляет UEFI и не допускает того чтобы он крутился быстрее, чем это необходимо. Если остались вопросы, пишите их в комментариях!
Управление оборотами 3-pin вентилятора посредством ШИМ(PWM)
Приветствую Вас! Это моя первая запись на ПС.Комп оборудован самодельной СВО,холодно,тихо,разгон -все замечательо.В системнике два вентилятора,120мм обдувал видеокарту(x1950gt Palit 512MB),а 250мм работает на вдув(корпус Aerocool) и третий в БП.Вентиляторы подключались параллельно через эмиттерный повторитель к разъему кулера видеокарты(2-pin),а сам кулер уступил место водоблоку.Схема работы очень проста,напряжение(читай обороты) на коннекторе кулера видеркарты регулируется в Riva Tuner и вентиляторы крутятъся как мне угодно.
Все было хорошо до смены видеокарты на GF8800 GT 512MB Palit(синий кулер,не Sonic).Карта была подвегнута недельной пытке(разгон и тесты, на чем только можно),после чего поставил на нее «воду»,а кулер, соответственно, отправился отдыхать.
Теперь ближе к делу.На этой карте кулер имеет четыре контакта и управляется ШИМ-сигналом, моя схема отказалась регулировать обороты.Пришлось расширить свои познания о технологии широтно-импульсной модуляции в интернете.Решение оказалось довольно простым -применить полевой транзистор,а не биполярный.Cхему приводить не буду,достаточно фотографии «изделия».
Паяем!
Я применил полевой транзистор D50NH,всем хорошо знакомый MOSFET.Донором послужила видеокарта 7600gt Palit,павшая жертвой вольтмода более года назад.Транзистор включается в разрыв черного провода(«-» или «земля»), ШИМ-сигнал подается на затвор транзистора с видеокарты(на моей это синий провод или 1-й контакт слева).Желательно это сделать через резистор 1-2кОм «на всякий случай»,т.к полевики боятся статики.Как видно на фото,питается вентилятор через 3-pin разъем и подключен к материнке,можно и к видеокарте подкючить,при наличии соответствующего разъема.Если все подкючено верно и транзистор не «битый»,вентиль становится «послушным».

Таким не хитрым способом можно регулировать любой вентилятор.Не редко меняют «боксовый» кулер с 4-pin(ШИМ) коннектором на более эффективный,но оснащенный вентилятором с 3-pin разъемом,при этом на материнке остается невостребованным именно четвертый контакт с ШИМ сигналом.Теперь и его задействовать можно,например, у меня подключен корпусной 250мм вентиль,но им уже рулит Speedfan.
Надеюсь,мой опыт кому-то окажется полезным.
P.S
На фото черный провод на маленьком 2-pin разъеме ИЗОЛИРОВАН! Лень отрезать было.
Мониторинг оборотов в этой схеме не РАБОТАЕТ! Провод таходатчика необходимо отключить(по совету крупного спецталиста),во избежание повреждения схемы мониторинга оборотов или вентилятора!
Дополнение 28.02.2008
| Максимальное Напряжение Питания | 5.5В |
| Минимальное Напряжение Питания | 3В |
| Количество Выводов | 16вывод(-ов) |
| Минимальная Измеряемая Температура | -40 C |
| Максимальная Измеряемая Температура | 125 C |
| Тип Выхода Микросхемы | Открытый Сток |
| Стиль Корпуса Микросхемы Датчика | QSOP |
| Диапазон Точности Измерения | ± 1 C |
| Maximum Operating Temperature | +125 °C |
| Length | 4. 98mm 98mm |
| Minimum Operating Supply Voltage | 3 В |
| Brand | Maxim Integrated |
| Package Type | QSOP |
| Mounting Type | Поверхностный монтаж |
| Minimum Operating Temperature | -40 °C |
| Width | 3.99мм |
| Height | 1.481mm |
| Output Type | ШИМ |
| Maximum Operating Supply Voltage | 5.5 V |
| Pin Count | 16 |
| Dimensions | 4.98 x 3.99 x 1.481mm |
| Другие названия товара № | MAX6653 |
| Категория продукта | Температурные датчики для монтажа на плате |
| Максимальная рабочая температура | + 125 C |
| Минимальная рабочая температура | 40 C |
Напряжение питания — макс. |
5.5 V |
| Напряжение питания — мин. | 3 V |
| Подкатегория | Sensors |
| Размер фабричной упаковки | 100 |
| Разрешение | 11 bit |
| Серия | MAX6653 |
| Тип выхода | Digital |
| Тип интерфейса | 2-Wire, I2C, SMBus |
| Тип продукта | Temperature Sensors |
| Торговая марка | Maxim Integrated |
| Точность | +/- 1 C |
| Упаковка | Tube |
| Упаковка / блок | QSOP-16 |
| Вес, г | 0.09 |
Борьба с вентилятором охлаждения
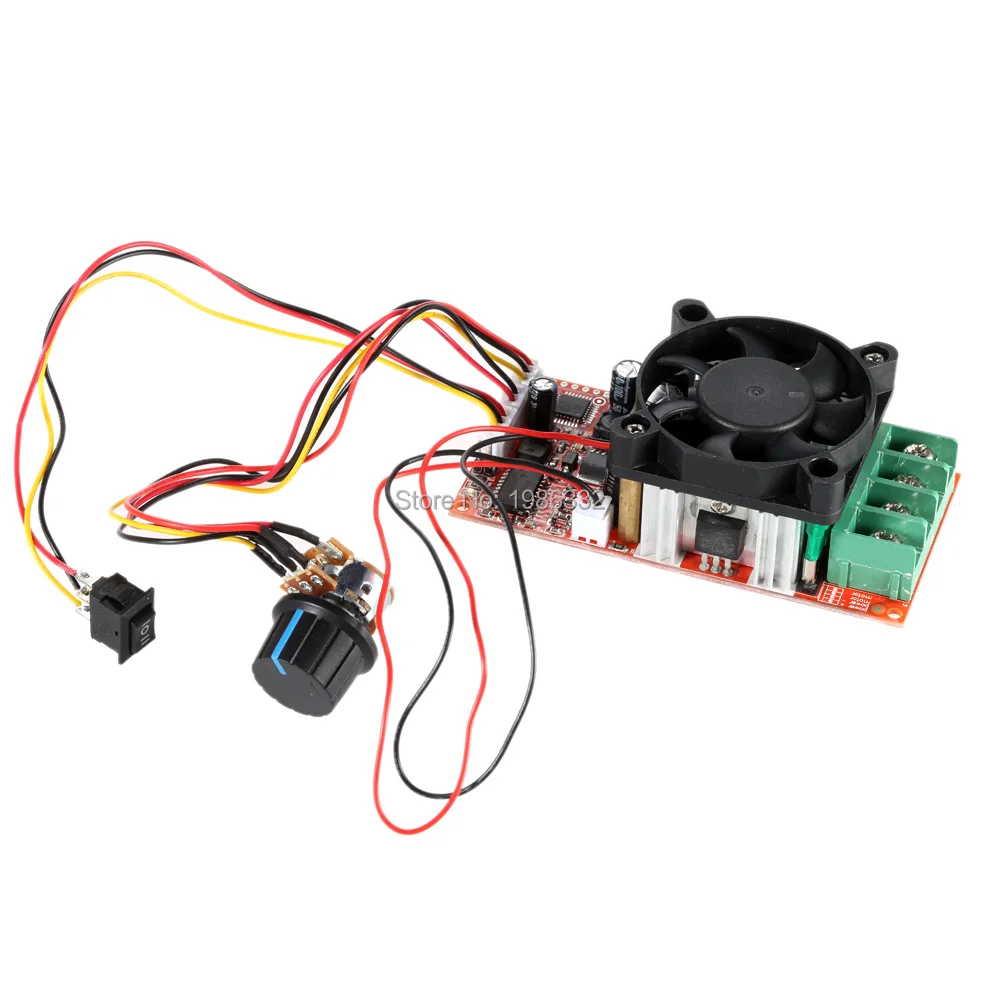
После установки драйверов TMC2100 шум от работы вентиляторов стал преобладать над шумом от работы двигателей. С вентилятором обдува платы RAMPS я разобрался с помощью регулятора оборотов. Под вентилятор обдува хотэнда скорее всего закажу отдельный модуль понижения напряжения и чуть снижу напряжения питания, благо при переходе на с 30 на 40 мм вентилятор есть запас по мощности потока.
С вентилятором обдува платы RAMPS я разобрался с помощью регулятора оборотов. Под вентилятор обдува хотэнда скорее всего закажу отдельный модуль понижения напряжения и чуть снижу напряжения питания, благо при переходе на с 30 на 40 мм вентилятор есть запас по мощности потока.
Сегодня речь пойдет о вентиляторе обдува модели, который имеет возможность программной регулировки мощности, а значит предыдущие способы не подойдут. Для регулировки скорости вентилятора используется ШИМ (PWM).
Вот так выглядит управляющий сигнал при установке значения скорости через экран на 60 единиц (~24%):
При 127 единицах (50%): И при 200 единицах (~78%):Довольно распространенный способ регулировки, но есть одна особенность в реализации по умолчанию — частота сигнала всего 500 Гц. С учетом особенностей работы мотора вентилятора, эта частота попадает в слышимый диапазон, поэтому на всех скоростях ниже 100% мы слышим писк. И чем ниже мощность, тем больше неприятный звук.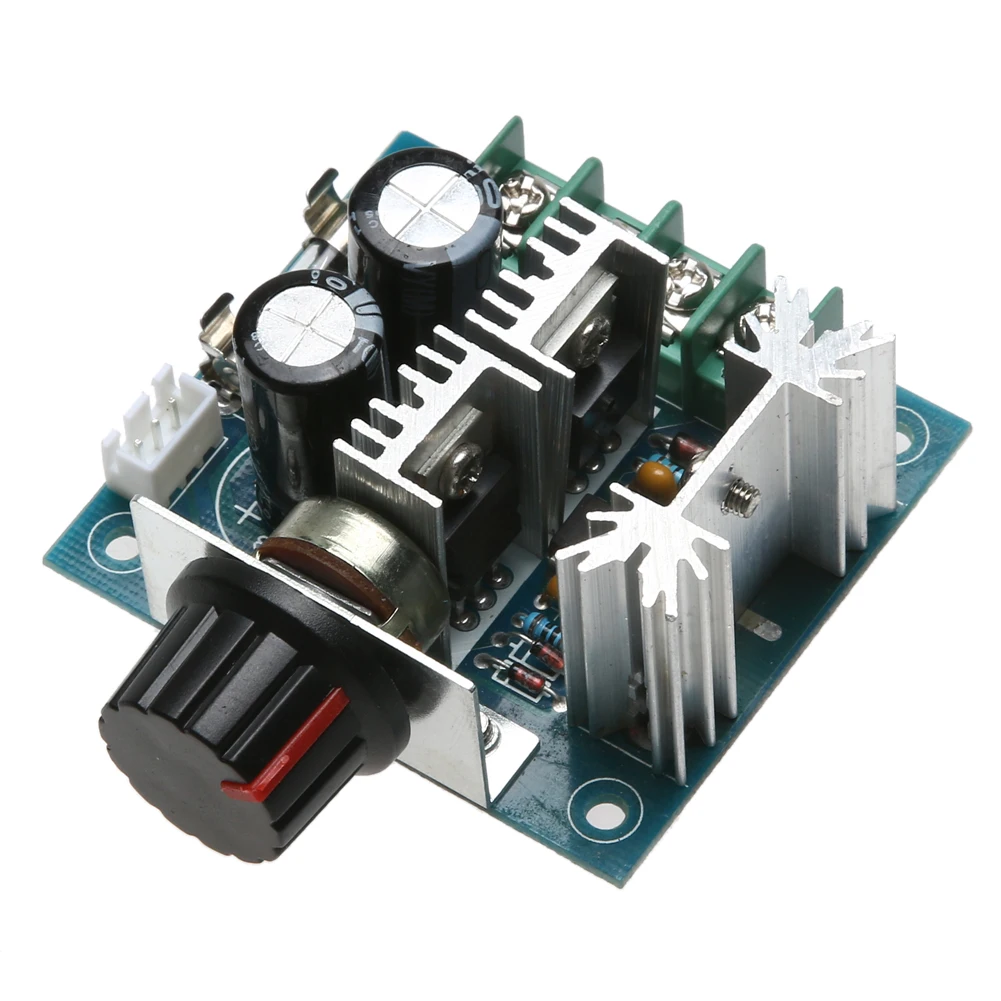
Если звук вентилятора досаждает, то есть несколько способов решения этого вопроса.
1. Увеличение частоты работы ШИМ.
В Marlin за это отвечает параметр FAST_PWM_FAN. Необходимо убрать комментарии с определения этого параметра и загрузить измененную прошивку.
Частота сигнала на 50% мощности сразу прыгает до 31 кГц:
Казалось бы то что надо, но ни один из моих китайских 40 мм вентиляторов не завелся в этом режиме на средних скоростях. И только ближе к полной мощности сразу же начинали дуть на полную. А вот большие вентиляторы на 60 и 80 мм отработали отлично, без какого либо намека на дополнительный шум.Оставим этот вариант до покупки другого 40 мм вентилятора и перейдем к следующему решению.
2. Уменьшение частоты работы ШИМ.
В Marlin есть режим программной реализации управления вентилятором, при котором частота резко снижается до нескольких Гц. За это отвечает параметр FAN_SOFT_PWM.
Частота сигнала на 50% мощности резко падает до 7 Гц: Эффект от этого режима чувствуется, но некий призвук в виде щелчков от работы на малых скоростях все-таки присутствует. Поэтому я решил не останавливаться и пойти дальше.
Поэтому я решил не останавливаться и пойти дальше.3. Простой аппаратный фильтр.
Вариант аппаратного решения вопроса — установка параллельно выходам конденсатора, который сгладит пульсацию до определенного уровня при стандартных 500 Гц.
Я из наличия подобрал емкость конденсатора и лучше всего подошел электролитический конденсатор на 10 мкФ. Меньшей емкости не хватает, при большей емкости (пробовал 220 мкФ) на разных значениях мощности скорость вентилятора практически не меняется и приближается к максимальной.
Конденсатор подключается к средним контактам на плате, плюсовая клемма ближе к зеленому штекеру питания.
Паять конденсатор на саму RAMPS не стал для возможности быстро вернуть все обратно при необходимости.При таком способе небольшой писк есть только при очень малых мощностях, но ‘заводится’ вентилятор довольно рано и уже к 50% есть звук только от потока воздуха без дополнительных призвуков.
В итоге каждый может выбрать тот вариант, который больше всего подходит к его принтеру.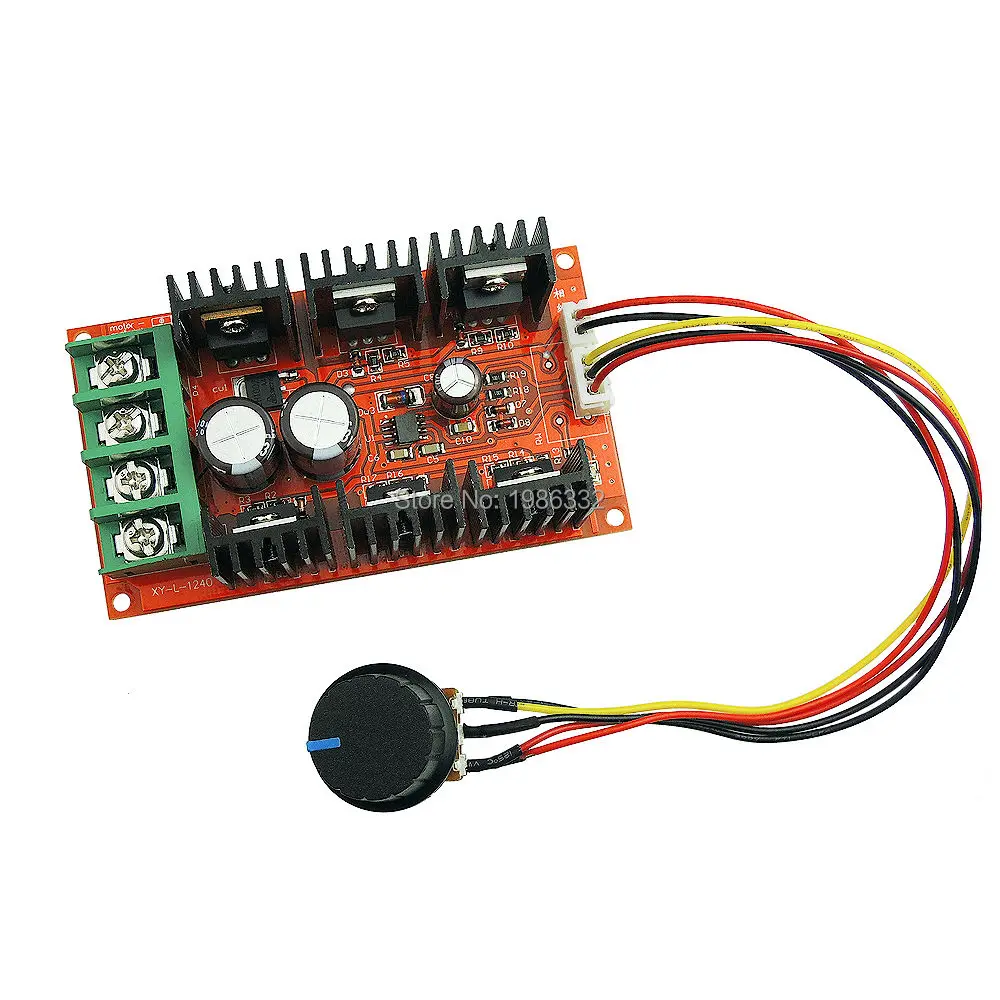 А счастливчики, которые не слышат никаких посторонних звуков в своих закрытых корпусах, могут расслабиться и порадоваться за свои 3D принтеры 🙂
А счастливчики, которые не слышат никаких посторонних звуков в своих закрытых корпусах, могут расслабиться и порадоваться за свои 3D принтеры 🙂
Демонстрационная плата управления 12 В вентилятором
ADM00879 – демонстрационная плата (Рис. 1) управления 12 В вентилятором на основе микросхемы многоканального ШИМ-контроллера вентилятора EMC2305 (Рис. 2, Рис. 3) и многоканального датчика температуры EMC1438.
Пользователю доступно пять каналов для подключения вентиляторов, два встроенных датчика температуры и шесть входов дистанционно расположенных датчиков температуры.
EMC2305 — это SMBus совместимый контроллер вентилятора, имеющий до пяти независимо управляемых ШИМ драйверов вентиляторов. Каждый драйвер вентилятора управляется ШИМ-драйвером с программируемой частотой и алгоритмом управления скоростью вентилятора, который работает либо в режиме замкнутого контура, либо в качестве устройства с прямым ШИМ-управлением.
Алгоритм управления скоростью вентилятора в замкнутом контуре (FSC) позволяет обнаруживать проблемные (стареющие) вентиляторы и оповещать систему. Он также обнаружит остановленные или заблокированные вентиляторы и вызовет прерывание. Кроме того, EMC2305 имеет тактовый выход, так что несколько устройств могут быть связаны и подключены к одному источнику синхронизации для оптимальной производительности в больших распределенных системах.
Он также обнаружит остановленные или заблокированные вентиляторы и вызовет прерывание. Кроме того, EMC2305 имеет тактовый выход, так что несколько устройств могут быть связаны и подключены к одному источнику синхронизации для оптимальной производительности в больших распределенных системах.
EMC1438 — это высокоточный недорогой SMBus датчик температуры. Расширенные функции, такие как коррекция ошибок сопротивления (REC), бета-компенсация (для процессорных диодов) и пр., обеспечивают надежное решение для сложных задач мониторинга окружающей среды.
Кроме того, микросхема EMC1438 обеспечивает аппаратно программируемую функцию отключения системы.
Каждый канал обеспечивает точность ± 1°C при измерении температуры внешнего диода и ± 2°C для температуры внутреннего диода. EMC1438 мониторит до восьми температурных каналов (до семи внешних и один внутренний).
Низковольтные цепи платы питаются либо через micro USB, либо через разъем для 12 В источника питания вентилятора, делая возможным запуск приложения на ПК и установку всех параметров без питания драйверов вентилятора. Также доступны тестовые точки для 12 В входа.
Также доступны тестовые точки для 12 В входа.
I2C коммуникации обеспечиваются через USB с использованием встроенной микросхемы USB-I2C моста MCP2221. Утилита GUI управления температурой может автоматически обнаружить плату и нагрузки соответствующего интерфейса.
В демонстрационном графическом интерфейсе пользователя (GUI) платы есть опции для ручной установки всех параметров термодатчика и контроллера вентилятора, а также полностью автоматизированный интерфейс управления температурой, где любой канал вентилятора может быть связан с любым каналом контроля температуры.
Встроенный источник тепла с четырьмя уровнями нагрева предназначен для демонстрационных целей.
Применение:
- Сервера
- Проекторы
- Промышленное и сетевое оборудование
- Ноутбуки
Рис. 1. Демонстрационная плата ADM00879
Рис. 2. Структурная схема контроллера вентилятора EMC2305
Рис.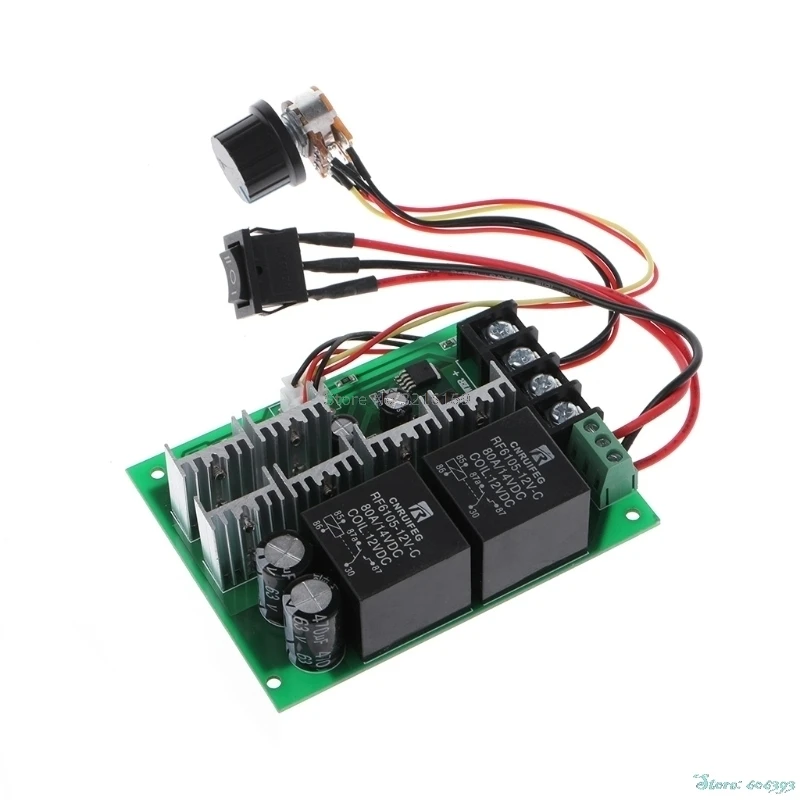 3. Структура системы на основе контроллера вентилятора EMC2305
3. Структура системы на основе контроллера вентилятора EMC2305
Отличительные особенности:
- Пять каналов для подключения вентиляторов с контролем оборотов (RPM)
- Возможность управления 3-х или 4-х проводными вентиляторами
- Два встроенных датчика температуры
- Шесть удаленных подключений датчика температуры
Страница изделия на сайте производителя.
PWM (вентилятор) — Kobol Wiki
Предупреждение
Всегда ВЫКЛЮЧАЙТЕ систему перед подключением / отключением вентилятора. Невыполнение этого требования может привести к повреждению управляющего GPIO из-за скачка напряжения.
PWM Введение
ШИМ или широтно-импульсная модуляция — это метод, который позволяет нам регулировать среднее значение напряжения, которое поступает на электронное устройство, путем изменения рабочего цикла мощности с высокой скоростью.
Термин рабочий цикл описывает пропорцию времени «включения» к регулярному интервалу или «периоду» времени; низкий рабочий цикл соответствует низкой мощности, потому что большую часть времени питание отключено. Рабочий цикл выражается в процентах, при 100% включенном состоянии. Когда цифровой сигнал присутствует половину времени и выключен вторую половину времени, цифровой сигнал имеет рабочий цикл 50% и напоминает «прямоугольную» волну. Когда цифровой сигнал находится во включенном состоянии больше времени, чем в выключенном, он имеет рабочий цикл> 50%. Когда цифровой сигнал находится в выключенном состоянии больше времени, чем во включенном состоянии, он имеет рабочий цикл <50%. Вот иллюстрация, иллюстрирующая эти три сценария:
Рабочий цикл выражается в процентах, при 100% включенном состоянии. Когда цифровой сигнал присутствует половину времени и выключен вторую половину времени, цифровой сигнал имеет рабочий цикл 50% и напоминает «прямоугольную» волну. Когда цифровой сигнал находится во включенном состоянии больше времени, чем в выключенном, он имеет рабочий цикл> 50%. Когда цифровой сигнал находится в выключенном состоянии больше времени, чем во включенном состоянии, он имеет рабочий цикл <50%. Вот иллюстрация, иллюстрирующая эти три сценария:
Реализация вентилятора PWM
Тип-A
Тип-B
Тип-C
Схема управления вентилятором Helios4
Board Rev 1.1
Примечания
| Описание | Заголовок J10 | Заголовок J17 | Замечания |
|---|---|---|---|
| вывод ШИМ | гпио41 | гпио55 | 3,3 В вытяжной вентилятор ТОЛЬКО ! Раннее поколение 4-проводных вентиляторов с ШИМ может использовать подтягивание 5 В |
| SENSE pin | гпио43 | гпио48 | Вывод SENSE еще не реализован |
| Частота ШИМ | 25 кГц | 25 кГц | определен в дереве устройств |
Board Rev 1.
 2
2Примечания
| Описание | Заголовок J10 | Заголовок J17 | Замечания |
|---|---|---|---|
| вывод ШИМ | гпио41 | гпио55 | 5 В толерантный |
| SENSE pin | гпио43 | гпио48 | Вывод SENSE еще не реализован |
| Частота ШИМ | 25 кГц | 25 кГц | определен в дереве устройств |
Комплектный вентилятор
Распиновка разъема
| Штифт | Функция | Цвет провода |
|---|---|---|
| 1 | GND | Черный |
| 2 | 12 В | Красный |
| 3 | Смысл | Желтый |
| 4 | Контроль | Синий |
Вентилятор типа A (партии 1 и 3)
Спецификация вентилятора
| Параметр | Значение | Блок | Замечания |
|---|---|---|---|
| Максимальная скорость | 4200 | об / мин | @ рабочий цикл 98% |
| Минимальная скорость | 1200 | об / мин | @ рабочий цикл 24% |
| Отключение | Нет | Не поддерживается | |
| Тип реализации | А |
Информация
Данные рабочего цикла преобразованы из Linux PWM
Вентилятор типа C (партия 2)
Спецификация вентилятора
| Параметр | Значение | Блок | Замечания |
|---|---|---|---|
| Максимальная скорость | 4200 | об / мин | @ рабочий цикл 98% |
| Минимальная скорость | 400 | об / мин | @ рабочий цикл 10% |
| Отключение | Есть | рабочий цикл <= 5. 5% и перезапуск при рабочем цикле> 9% 5% и перезапуск при рабочем цикле> 9% | |
| Тип реализации | С |
Информация
Данные рабочего цикла преобразованы из Linux PWM
Сравнение скорости вращения вентилятора
Датчики температуры Helios4
Датчик температуры процессора
Armada 388 включает механизм управления температурой для контроля температуры матрицы. Он включает в себя аналого-цифровой термодатчик на кристалле, который используется для определения момента достижения максимальной заданной температуры перехода процессора.
Ethernet PHY Датчик температуры
Helios4 10/100/1000 BASE-T PHY Tranceiver (Marvell 88E1512 Datasheet) оснащен внутренним датчиком температуры. Датчик сообщает температуру кристалла и обновляется примерно раз в секунду.
Датчик температуры платы
Helios4 имеет цифровой датчик температуры с 2-проводным интерфейсом (техническое описание NCT75), расположенный на нижней стороне платы. Он используется для считывания температуры окружающей среды.
Он используется для считывания температуры окружающей среды.
PWM Fan Control под Linux
Linux использует 8-битное целое число для представления рабочего цикла.Значение 0 PWM соответствует 0% рабочего цикла, а значение 255 PWM соответствует 100% рабочего цикла.
Ниже приведены графики зависимости скорости вращения вентилятора от значения ШИМ, а не рабочего цикла.
Требование исправления
В настоящее время драйвер gpio-mvebu для Linux не позволяет использовать более 1 PWM в одном банке gpio. Helios4 использует 2 ШИМ в одном банке, поэтому этот патч необходимо применить к исходному тексту ядра, чтобы снять ограничение.
Использование интерфейса SYSFS
Linux экспортирует механизм управления вентилятором в SYSFS в классе hwmon.Список устройств можно посмотреть в / sys / class / hwmon
ls -l / sys / класс / hwmon /
всего 0
lrwxrwxrwx 1 root root 0 26 июля 07:39 hwmon0 -> ../. ./devices/platform/soc/soc:internal-regs/f1072004.mdio/mdio_bus/f1072004.mdio-mii/f1072004.mdio-mii:00 / hwmon / hwmon0
lrwxrwxrwx 1 root root 0 26 июля 07:39 hwmon1 -> ../../devices/virtual/thermal/thermal_zone0/hwmon1
lrwxrwxrwx 1 root root 0 26 июля 07:39 hwmon2 -> ../../devices/platform/soc/soc:internal-regs/f1011000.i2c/i2c-0/0-004c/hwmon/hwmon2
lrwxrwxrwx 1 root root 0 26 июля 07:39 hwmon3 ->../../devices/platform/j10-pwm/hwmon/hwmon3
lrwxrwxrwx 1 root root 0 26 июля 07:39 hwmon4 -> ../../devices/platform/j17-pwm/hwmon/hwmon4
 ./devices/platform/soc/soc:internal-regs/f1072004.mdio/mdio_bus/f1072004.mdio-mii/f1072004.mdio-mii:00 / hwmon / hwmon0
lrwxrwxrwx 1 root root 0 26 июля 07:39 hwmon1 -> ../../devices/virtual/thermal/thermal_zone0/hwmon1
lrwxrwxrwx 1 root root 0 26 июля 07:39 hwmon2 -> ../../devices/platform/soc/soc:internal-regs/f1011000.i2c/i2c-0/0-004c/hwmon/hwmon2
lrwxrwxrwx 1 root root 0 26 июля 07:39 hwmon3 ->../../devices/platform/j10-pwm/hwmon/hwmon3
lrwxrwxrwx 1 root root 0 26 июля 07:39 hwmon4 -> ../../devices/platform/j17-pwm/hwmon/hwmon4
./devices/platform/soc/soc:internal-regs/f1072004.mdio/mdio_bus/f1072004.mdio-mii/f1072004.mdio-mii:00 / hwmon / hwmon0
lrwxrwxrwx 1 root root 0 26 июля 07:39 hwmon1 -> ../../devices/virtual/thermal/thermal_zone0/hwmon1
lrwxrwxrwx 1 root root 0 26 июля 07:39 hwmon2 -> ../../devices/platform/soc/soc:internal-regs/f1011000.i2c/i2c-0/0-004c/hwmon/hwmon2
lrwxrwxrwx 1 root root 0 26 июля 07:39 hwmon3 ->../../devices/platform/j10-pwm/hwmon/hwmon3
lrwxrwxrwx 1 root root 0 26 июля 07:39 hwmon4 -> ../../devices/platform/j17-pwm/hwmon/hwmon4
Информация
Нумерация может отличаться от приведенного выше примера вывода. Порядок инициализации устройства зависит от того, построен ли драйвер как модуль ядра или как встроенный. Учитывайте это при использовании fancontrol
.Чтобы определить, какой hwmon принадлежит к вентилятору, найдите j10-pwm и j17-pwm . В примере выше
hwmon3 ->../../devices/platform/j10-pwm/hwmon/hwmon3
hwmon4 -> . ./../devices/platform/j17-pwm/hwmon/hwmon4
 ./../devices/platform/j17-pwm/hwmon/hwmon4
./../devices/platform/j17-pwm/hwmon/hwmon4
Для чтения текущего ШИМ
cat / sys / class / hwmon3 / pwm1
кошка / sys / класс / hwmon4 / pwm1
Для установки ШИМ
эхо NEW_PWM_VALUE> / sys / class / hwmon3 / pwm1
echo NEW_PWM_VALUE> / sys / class / hwmon4 / pwm1
Fancontrol — автоматизированное программное управление скоростью вращения вентилятора
fancontrol — это сценарий оболочки для использования с lm_sensors.Он считывает свою конфигурацию из файла, затем вычисляет скорость вращения вентилятора по температуре и устанавливает соответствующие выходы ШИМ на вычисленные значения.
sudo apt-get install fancontrol
fancontrol включает сценарий pwmconfig для автоматического создания файла конфигурации, но он не может использоваться для Helios4.
Правила UDEV
Поскольку порядок hwmon может быть изменен между версиями ядра или даже между перезагрузками, в Armbian мы используем правила udev в качестве обходного пути. Правила можно найти здесь и скопировать по адресу /etc/udev/rules.d/
Правила можно найти здесь и скопировать по адресу /etc/udev/rules.d/
/ dev / fan-j10, / dev / fan-j17, / dev / Thermal-cpu, / dev / therm-board, и / dev / Thermal-eth — это символические ссылки, созданные правилами udev.
Файл конфигурации
fancontrol использует / etc / fancontrol в качестве файла конфигурации. Ниже приведен пример конфигурации для управления скоростью вращения вентилятора на Helios4.
# Helios4 PWM Конфигурация управления вентилятором
# Источник температуры: / dev / Thermal-cpu
ИНТЕРВАЛ = 10
FCTEMPS = / dev / fan-j10 / pwm1 = / dev / therm-cpu / temp1_input / dev / fan-j17 / pwm1 = / dev / therm-cpu / temp1_input
MINTEMP = / dev / fan-j10 / pwm1 = 40 / dev / fan-j17 / pwm1 = 40
MAXTEMP = / dev / fan-j10 / pwm1 = 80 / dev / fan-j17 / pwm1 = 80
MINSTART = / dev / fan-j10 / pwm1 = 20 / dev / fan-j17 / pwm1 = 20
MINSTOP = / dev / fan-j10 / pwm1 = 29 / dev / fan-j17 / pwm1 = 29
MINPWM = 20
ИНТЕРВАЛ
Эта переменная определяет, с каким интервалом в секундах будет выполняться основной цикл управления вентилятором.
FCTEMPS
Сопоставляет выходы ШИМ с датчиками температуры, чтобы fancontrol знал, какие датчики температуры следует использовать для расчета новых значений для соответствующих выходов ШИМ.
Вентиляторы ( fan-j10 и fan-j17 ) управляются на основании показаний термодатчика процессора ( therm-cpu ).
MINSTART
Устанавливает минимальную скорость, с которой вентилятор начинает вращаться. Вы должны использовать безопасное значение, чтобы убедиться, что оно работает, даже когда вентилятор устареет.
Перезапуск вентилятора Type-C на 15, добавлено 5 для безопасности (в случае старения вентилятора) дает нам 20 . Это значение не влияет на вентилятор типа A.
MINSTOP
Минимальная скорость, с которой вентилятор все еще вращается. Здесь также используйте безопасное значение.
Вентилятор Type-C остановился на 24, добавив 5 для безопасности (в случае старения вентилятора), мы получим 29 . Это значение не влияет на вентилятор типа A.
Это значение не влияет на вентилятор типа A.
Следующие настройки могут быть изменены пользователем для дальнейшей настройки.
МИНТЭМП
Температура, ниже которой вентилятор переключается на минимальную скорость.
Вентиляторы (fan-j10 и fan-j17) работают на минимальной скорости, если температура процессора ниже 40 градусов C.
MAXTEMP
Температура, при которой вентилятор переключается на максимальную скорость.
Вентиляторы (fan-j10 и fan-j17) работают на максимальной скорости, если температура процессора выше 80 градусов C.
MINPWM
Значение ШИМ для использования, когда температура ниже MINTEMP. Обычно это будет либо 0, если вентилятор нормально останавливается, либо то же значение, что и MINSTOP, если вы не хотите, чтобы вентилятор когда-либо останавливался.Если это значение не определено, оно по умолчанию равно 0 (вентилятор остановлен).
Установите минимальное значение ШИМ на 0 . На вентиляторе типа C он останавливал вентилятор, а на вентиляторе типа A он работал с минимальной скоростью.
На вентиляторе типа C он останавливал вентилятор, а на вентиляторе типа A он работал с минимальной скоростью.
Примечание
Файл конфигурации Helios4 fancontrol можно найти здесь.
Тепловая зона в дереве устройств
В качестве альтернативы пользовательскому инструменту, такому как fancontrol, ядро Linux предоставляет Thermal Framework для управления температурным режимом.
Ниже приведен пример узлов дерева устройств, которые можно добавить в дерево устройств Helios4 для использования Linux Thermal Framework.
Примечание
В настоящее время armada_thermal Драйвер (CPU Thermal Sensor) не поддерживает привязку температурных зон в дереве устройств, поэтому он пока не может использоваться в качестве термодатчика.
/ {
...
fan1: j10-pwm {
совместимый = "pwm-fan";
pwms = <& gpio1 9 40000>; / * Целевая частота: 25 кГц * /
мин-состояние охлаждения = <0>;
охлаждение-макс-состояние = <3>;
# Cool-Cells = <2>;
уровни охлаждения = <0 25 128 255>;
};
fan2: j17-pwm {
совместимый = "pwm-fan";
pwms = <& gpio1 23 40000>; / * Целевая частота: 25 кГц * /
мин-состояние охлаждения = <0>;
охлаждение-макс-состояние = <3>;
# Cool-Cells = <2>;
уровни охлаждения = <0 25 128 255>;
};
термальные зоны {
microsom_thermal: microsom-therm {
термодатчики = <& термический>;
пассивная задержка опроса = <250>; / * миллисекунды * /
задержка опроса = <500>; / * миллисекунды * /
Trips {
cpu_active: cpu_active {
/ * миллицельсий * /
температура = <40000>;
гистерезис = <2000>;
type = "активный";
};
cpu_alert: cpu_alert {
/ * миллицельсий * /
температура = <80000>;
гистерезис = <2000>;
type = "горячий";
};
cpu_crit: cpu-cris {
/ * миллицельсий * /
температура = <115000>;
гистерезис = <5000>;
type = "критический";
};
};
};
board_thermal: board-therm {
термодатчики = <& temp_sensor>;
пассивный опрос задержки = <0>; / * миллисекунды * /
задержка опроса = <1500>; / * миллисекунды * /
Trips {
board_active: board-active {
/ * миллицельсий * /
температура = <40000>;
гистерезис = <2000>;
type = "активный";
};
board_alert: board-alert {
/ * миллицельсий * /
температура = <60000>;
гистерезис = <2000>;
type = "горячий";
};
board_critical: board-critical {
/ * миллицельсий * /
температура = <70000>;
гистерезис = <2000>;
type = "критический";
};
};
Cooling-Maps {
map0 {
trip = <& board_active>;
охлаждающее устройство = <& fan1 THERMAL_NO_LIMIT 2>,
<& fan2 THERMAL_NO_LIMIT 2>;
};
map1 {
trip = <& board_alert>;
охлаждающее устройство = <& fan1 2 THERMAL_NO_LIMIT>,
<& fan2 2 THERMAL_NO_LIMIT>;
};
};
};
};
. ..
};
& temp_sensor {
# термодатчики-ячейки = <0>;
};
 ..
};
& temp_sensor {
# термодатчики-ячейки = <0>;
};
..
};
& temp_sensor {
# термодатчики-ячейки = <0>;
};
Список литературы
Широтно-импульсная модуляция
Спецификация вентиляторов с 4-проводной широтно-импульсной модуляцией (ШИМ)rev. 1,3
Справочная страницаfancontrol
Дескриптор дерева устройств Linux Thermal Framework
Последнее изменение: 7 августа 2020 г.
Северный радиатор | Комплект управления вентилятором PWM
{{vm.product.shortDescription}}
{{section. sectionName}}:
sectionName}}:
{{option.description}}
Цена Jobber: {{vm.product.pricing.regularPriceDisplay}}
/ {{vm.product.unitOfMeasureDescription || vm.product.unitOfMeasureDisplay}}
Цена для вас: / {{vm.product.unitOfMeasureDescription || vm.product.unitOfMeasureDisplay}}
{{раздел.sectionName}}
Выберите {{section. sectionName}}
sectionName}}
{{styleTrait.nameDisplay}} {{styleTrait.unselectedValue? «»: «Выбрать»}} {{styleTrait.unselectedValue? styleTrait.unselectedValue: styleTrait.nameDisplay}}
- Атрибуты
- Документы
- {{Технические характеристики. nameDisplay}}
- Атрибуты
- Документы
 nameDisplay}}
nameDisplay}}| Марка | |
| {{attributeValue.valueDisplay}} {{$ last? »: ‘,’}} |
| Марка | |
| {{attributeValue.valueDisplay}} {{$ last? »: ‘,’}} |
 product.brand.name»>
product.brand.name»>доля
Электронное письмо было успешно отправлено. Электронное письмо не было отправлено, проверьте данные формы.
×ШИМ-контроллер вентилятора с 2 вентиляторами
| Эксплуатация / установка PDFCirrus-2 Лист данных |
SmartFan® Cirrus-2 — это программируемый контроллер вентилятора, предназначенный для мониторинга и управления одним или двумя 4-проводными вентиляторами или нагнетателями с ШИМ 12, 24 или 48 В постоянного тока. Контроллер вентилятора Cirrus-2 легко программируется с помощью портативного пульта дистанционного управления Navigator PRG00-F , избавляя от необходимости использовать дисплей и клавиатуру на каждом блоке управления вентилятором. Используя навигатор, можно настроить кривую управления вентилятором, пороги срабатывания сигнализации, пороги включения / выключения вентилятора, входы управляющих сигналов, частоту вентилятора, дополнительное напряжение питания преобразователя, режимы отказоустойчивости и многое другое. Заводское программирование и настройка доступны для заказов от 50 штук.
Контроллер вентилятора Cirrus-2 легко программируется с помощью портативного пульта дистанционного управления Navigator PRG00-F , избавляя от необходимости использовать дисплей и клавиатуру на каждом блоке управления вентилятором. Используя навигатор, можно настроить кривую управления вентилятором, пороги срабатывания сигнализации, пороги включения / выключения вентилятора, входы управляющих сигналов, частоту вентилятора, дополнительное напряжение питания преобразователя, режимы отказоустойчивости и многое другое. Заводское программирование и настройка доступны для заказов от 50 штук.
Чтобы узнать о других стандартных элементах управления вентиляторами постоянного тока, посетите SmartFan ® DC .Поскольку ни одна линейка продуктов не может предвидеть все приложения, Control Resources также специализируется на разработке и производстве настраиваемых элементов управления .
| Технические характеристики | Программируемые переменные |
|---|---|
|
|
 6 унций. (46 грамм)
6 унций. (46 грамм)Размеры контроллера вентилятора SmartFan Cirrus 2 PWM
Для чертежей САПР используйте ссылки в разделе «Дополнительная информация» ниже.
SmartFan Cirrus 2 PWM контроллер вентилятора Номера деталей
| Номер детали | Сигнал управления вентилятором |
| 4WR2C00-F | Cirrus 2 (для вентилятора с открытым коллектором PWM) |
| 4WR2V00-F | Cirrus 2 (для вентилятора с ШИМ 0-12 В постоянного тока) |
| PRG00-F | Программатор дистанционного управления для навигатора |
| DIN350-F | Дополнительный комплект для монтажа на DIN-рейку (щелкните, чтобы увидеть размеры) |
| Дистанционные датчики температуры | Выносные датчики температуры продаются отдельно |
Дополнительная информация
»Лист данных по эксплуатации / установке Cirrus-2 (PDF)
» Техническое описание удаленного программатора Navigator (PDF)
»Чертеж Cirrus-2 STEP CAD (. step)
step)
ПРИМЕЧАНИЕ. Если файл САПР открывается в новом окне браузера с текстом, щелкните ссылку правой кнопкой мыши, выберите «Сохранить ссылку как» и выберите локальную папку для сохранения файла.
»Прейскурант SmartFan (PDF)
» Щелкните здесь, чтобы задать вопросы или комментарии.
Чтобы поговорить с инженером или представителем сервисной службы, позвоните по телефону (978) 486-4160 (9:00 AM — 17:00 PM EST)
Контроль скорости вентилятора — ArchWiki
Управление вентиляторами может дать вашей системе различные преимущества, такие как более тихая работа системы и экономия энергии за счет полной остановки вентиляторов при низкой загрузке процессора.
Предупреждение: Настройка или полная остановка вентиляторов при высокой загрузке системы может привести к необратимому повреждению оборудования.
Обзор
Примечание: Пользователи портативных компьютеров должны знать, как работает система охлаждения в их оборудовании. Некоторые ноутбуки имеют по одному вентилятору для процессора и графического процессора и одновременно охлаждают оба. Некоторые ноутбуки имеют два вентилятора для ЦП и ГП, но первый вентилятор охлаждает ЦП и ГП одновременно, а другой — только ЦП. В некоторых случаях вы не сможете использовать скрипт Fancontrol из-за несовместимой архитектуры охлаждения (например,грамм. один вентилятор для GPU и CPU). Вот еще немного информации по этой теме.
Некоторые ноутбуки имеют по одному вентилятору для процессора и графического процессора и одновременно охлаждают оба. Некоторые ноутбуки имеют два вентилятора для ЦП и ГП, но первый вентилятор охлаждает ЦП и ГП одновременно, а другой — только ЦП. В некоторых случаях вы не сможете использовать скрипт Fancontrol из-за несовместимой архитектуры охлаждения (например,грамм. один вентилятор для GPU и CPU). Вот еще немного информации по этой теме.Существует несколько рабочих решений для управления вентиляторами как для настольных компьютеров, так и для ноутбуков. В зависимости от ваших потребностей:
Fancontrol (лм-датчики)
fancontrol является частью lm_sensors, которая может использоваться для управления скоростью вентиляторов процессора / корпуса.
Возможно, ядро Linux еще не поддерживает новые материнские платы. Проверьте официальную таблицу устройств lm-sensor, чтобы узнать, доступны ли экспериментальные драйверы для таких материнских плат.
лм-датчики
Первое, что нужно сделать, это запустить
# датчики-обнаружение
Это обнаружит все присутствующие датчики, и они будут использоваться для управления вентилятором. После этого выполните следующее, чтобы проверить, правильно ли он обнаружил датчики:
$ датчики
coretemp-isa-0000 Адаптер: адаптер ISA Сердечник 0: + 29,0 ° C (высокий = + 76,0 ° C, крит = + 100,0 ° C) ... it8718-isa-0290 Адаптер: адаптер ISA Vcc: +1,14 В (мин. = +0,00 В, макс. = +4.08 В) VTT: +2,08 В (мин. = +0,00 В, макс. = +4,08 В) + 3,3 В: +3,33 В (мин. = +0,00 В, макс. = +4,08 В) NB Vcore: +0,03 В (мин. = +0,00 В, макс. = +4,08 В) VDRAM: +2,13 В (мин. = +0,00 В, макс. = +4,08 В) fan1: 690 об / мин (мин = 10 об / мин) temp1: + 37,5 ° C (низкая = + 129,5 ° C, высокая = + 129,5 ° C) датчик = термистор temp2: + 25,0 ° C (низкая = + 127,0 ° C, высокая = + 127,0 ° C) датчик = термодиод
Конфигурация
После правильной настройки датчиков используйте pwmconfig для тестирования и настройки управления скоростью вращения вентилятора. Следуя руководству, следует создать / etc / fancontrol настроенный файл конфигурации. В руководстве ответы по умолчанию заключены в скобки, если вы нажмете клавишу ВВОД, ничего не вводя. Введите «y», если да, и «n», если нет.
Следуя руководству, следует создать / etc / fancontrol настроенный файл конфигурации. В руководстве ответы по умолчанию заключены в скобки, если вы нажмете клавишу ВВОД, ничего не вводя. Введите «y», если да, и «n», если нет.
# pwmconfigПримечание: Некоторые пользователи могут столкнуться с проблемами при использовании / sys / class / hwmon / paths для своего файла конфигурации. Символические ссылки устройств класса hwmon указывают на абсолютные пути и используются для группирования всех датчиков hwmon в одну папку для облегчения доступа.Иногда порядок устройств hwmon меняется после перезагрузки, что приводит к прекращению работы fancontrol. Перейдите в раздел # Пути к устройствам изменились в / etc / fancontrol для получения дополнительной информации о том, как это исправить.
Тонкая настройка
Некоторые пользователи могут захотеть вручную настроить файл конфигурации после запуска pwmconfig, обычно для того, чтобы что-то исправить. Чтобы вручную настроить файл конфигурации
Чтобы вручную настроить файл конфигурации / etc / fancontrol , см. Определения переменных на странице руководства fancontrol (8).
Пользователи, вероятно, столкнутся с проблемами пути hwmon, как указано выше в #Fancontrol (lm-сенсоры).Для получения дополнительной информации см. # Пути к устройствам изменились в / etc / fancontrol.
Совет: Используйте опции MAXPWM и MINPWM , которые ограничивают диапазон скорости вращения вентилятора. См. Подробную информацию на странице руководства fancontrol (8). Примечание: Пути датчика температуры и вентилятора также могут измениться (обычно при обновлении ядра) (например, hwmon0 / device / temp1_input становится hwmon0 / temp1_input ). Проверьте системный журнал, чтобы узнать, какой путь является источником проблем:# systemctl status fancontrol.службаи соответствующим образом исправьте свой файл конфигурации.

Запуск Fancontrol
Попробуйте запустить fancontrol :
# fancontrol
Правильно сконфигурированная установка не будет выводить ошибки и будет управлять вентиляторами системы. Пользователи должны услышать запуск системных вентиляторов вскоре после выполнения этой команды.
Чтобы включить автоматический запуск fancontrol при каждой загрузке, включите fancontrol.service :
# systemctl enable fancontrol.служба
Чтобы запустить его в фоновом режиме, запустите
# systemctl start fancontrol.service
Для неофициального графического интерфейса установите fancontrol-gui AUR или fancontrol-kcm AUR .
Fancontrol перестает работать после циклов приостановки-пробуждения
К сожалению, после приостановки fancontrol не работает. Согласно зарегистрированной ошибке, вам придется перезапустить fancontrol после приостановки. Этого можно добиться автоматически с помощью ловушки systemd.
Этого можно добиться автоматически с помощью ловушки systemd.
NBFC
NBFC — это кроссплатформенное решение для управления вентиляторами ноутбуков. Он поставляется с мощной системой конфигурации, которая позволяет адаптировать его ко многим различным моделям ноутбуков, включая некоторые из последних.
Установка
NBFC можно установить как nbfc AUR или nbfc-git AUR . Также запустите и включите nbfc.service .
Конфигурация
NBFC поставляется с готовыми профилями.Вы можете найти их в каталоге / opt / nbfc / Configs / . При их применении используйте точное имя профиля без расширения (например, some profile.xml становится "some profile" ).
Проверьте, может ли NBFC что-нибудь порекомендовать:
$ конфигурация nbfc -r
Если есть хотя бы одна модель, попробуйте применить этот профиль и посмотрите, как обрабатываются скорости вращения вентилятора. Например:
Например:
$ nbfc config -a "Asus Zenbook UX430UA"Примечание: Если вы получаете
File Descriptor не поддерживает запись , удалите StagWare.Plugins.ECSysLinux.dll [1] и перезапустите nbfc.service :# mv /opt/nbfc/Plugins/StagWare.Plugins.ECSysLinux.dll /opt/nbfc/Plugins/StagWare.Plugins.ECSysLinux.dll.old
Если приведенное выше решение не помогло, попробуйте добавить ec_sys.write_support = 1 к параметрам ядра.
Если рекомендуемых моделей нет, перейдите в репозиторий NBFC git или / opt / nbfc / Configs / и проверьте, есть ли похожие модели от того же производителя.Например, на Asus Zenbook UX430UQ конфигурация Asus Zenbook UX430UA не работала (вентиляторы полностью останавливались все время), а вот Asus Zenbook UX410UQ работал фантастически.
Запустите nbfc , чтобы увидеть все параметры. Более подробная информация о конфигурации доступна на вики-странице восходящего направления.
Ноутбуки Dell
i8kutils — это демон для настройки скорости вращения вентилятора в зависимости от температуры процессора на некоторых ноутбуках Dell Inspiron и Latitude.Он использует интерфейс / proc / i8k , предоставляемый драйвером dell_smm_hwmon (ранее i8k ). Результаты будут отличаться в зависимости от конкретной модели ноутбука.
Установка
i8kutils AUR — это основной пакет для управления скоростью вращения вентилятора. Кроме того, вы можете установить следующее:
- acpi — необходимо установить для использования
i8kmon. - tcl — необходимо установить для запуска
i8kmonв качестве фоновой службы (с использованием параметра--daemon). - tk — должен быть установлен вместе с tcl для работы в качестве настольного апплета X11.
- dell-bios-fan-control-git AUR — рекомендуется, если BIOS отменяет управление вентиляторами
Конфигурация
По умолчанию i8kmon только пассивно отслеживает температуру процессора и скорость вращения вентилятора. Чтобы включить управление скоростью вращения вентилятора, либо запустите его с параметром
Чтобы включить управление скоростью вращения вентилятора, либо запустите его с параметром --auto , либо включите его постоянно в файле /etc/i8kutils/i8kmon.conf :
установить конфигурацию (авто) 1
Температурные точки, при которых вентилятор меняет скорость, можно настроить в том же файле конфигурации.Поддерживаются только три скорости вентилятора (высокая, низкая и выключенная). Найдите раздел, похожий на следующий:
установить конфигурацию (0) {{0} -1 55 -1 55}
установить конфигурацию (1) {{1 1} 45 75 45 75}
установить конфигурацию (2) {{2 2} 65 128 65 128}
В этом примере вентилятор запускается на низкой скорости, когда температура процессора достигает 55 ° C, и переключается на высокую скорость при 75 ° C. Вентилятор снова переключится на низкую скорость, когда температура упадет до 65 ° C, и полностью выключится при 45 ° C.
Установка как услуга
i8kmon можно запустить автоматически как службу systemd:
# systemctl enable i8kmon # systemctl start i8kmon
BIOS отменяет управление вентилятором
Некоторые новые ноутбуки имеют управление вентилятором BIOS, которое отменяет управление вентилятором на уровне ОС. Чтобы проверить, так ли это, запустите
Чтобы проверить, так ли это, запустите i8kmon с подробным режимом в командной строке, убедитесь, что ЦП находится в режиме ожидания, а затем посмотрите, выключен или выключен вентилятор соответственно.
Если управление вентиляторами BIOS установлено, вы можете попробовать использовать dell-bios-fan-control-git AUR :
Предупреждение: отключение управления вентилятором в BIOS может привести к повреждению оборудования. Убедитесь, что вы правильно настроили i8kmon, или оставьте процессор в режиме ожидания, пока вы тестируете эту программу
Чтобы включить управление вентилятором BIOS:
# dell-bios-fan-control 1
Чтобы отключить управление вентилятором в BIOS:
# dell-bios-fan-control 0
Для автоматического отключения управления вентилятором в BIOS через systemd:
# systemctl enable dell-bios-fan-control # systemctl start dell-bios-fan-control
Ноутбуки ThinkPad
Текущие демоны управления вентиляторами, доступные в AUR: simpfand-git AUR и thinkfan AUR (рекомендуется).
Установка
Установите thinkfan AUR или thinkfan-git AUR . Необязательно, но рекомендуется установить lm_sensors. Тогда посмотрите файлы:
# pacman -Ql thinkfan
Обратите внимание, что пакет thinkfan устанавливает /usr/lib/modprobe.d/thinkpad_acpi.conf , который содержит
вариантов thinkpad_acpi fan_control = 1
Таким образом, управление вентилятором включено по умолчанию.
Теперь загрузите модуль:
# modprobe thinkpad_acpi # cat / proc / acpi / ibm / fan
Вы должны увидеть, что уровень вентилятора по умолчанию «автоматический», но вы можете повторить команду уровня в том же файле, чтобы управлять скоростью вентилятора вручную:
# уровень эха 1> / proc / acpi / ibm / fan
| Уровень | Эффект |
|---|---|
| 0 | выкл. |
| 2 | низкая скорость |
| 4 | средняя скорость |
| 7 | максимальная скорость |
| авто | по умолчанию — автоматический |
| полный ход | реальная максимальная скорость |
Демон thinkfan сделает это автоматически.
«7» — это не то же самое, что «полная скорость». «7» — максимальная регулируемая скорость. полная скорость — максимальная нерегулируемая скорость.
Наконец, включите thinkfan.service .
Для настройки пороговых значений температуры вам необходимо скопировать пример файла конфигурации ( /usr/share/doc/thinkfan/examples/thinkfan.yaml ) в /etc/thinkfan.conf и изменить по своему вкусу. В этом файле указывается, какие датчики следует считывать и какой интерфейс использовать для управления вентилятором.В некоторых системах доступны / proc / acpi / ibm / fan и / proc / acpi / ibm / Thermal ; на других вам нужно будет указать что-то вроде:
hwmon / sys / устройства / виртуальный / тепловой / термическая_зона0 / темп
, чтобы использовать стандартные датчики hwmon вместо специальных для thinkpad.
Работает
Вы можете сначала протестировать свою конфигурацию, запустив thinkfan вручную (от имени пользователя root):
# thinkfan -n
и посмотрите, как он реагирует на уровень нагрузки любых других запущенных вами программ.
После правильной настройки запустите / включите thinkfan.service .
Ноутбуки ASUS
В этом разделе рассматривается настройка драйверов на ноутбуках ASUS для Fancontrol (lm-сенсоры).
Модули ядра
В файлах конфигурации мы собираемся использовать полные пути к файлам sysfs (например, / sys / devices / platform / asus-nb-wmi / hwmon / hwmon [[: print:]] * / pwm1 ). Это потому, что hwmon 1 может измениться на любой другой номер после перезагрузки.Fancontrol (lm-sensor) написан на Bash, поэтому использование этих путей в файле конфигурации вполне допустимо. Вы можете найти полные примеры конфигурационного файла / etc / fancontrol на ASUS N550JV # Fan control.
asus-nb-wmi
asus-nb-wmi — это модуль ядра, который включен в ядро Linux и автоматически загружается на ноутбуки Asus. Это позволит управлять только одним вентилятором, а если есть второй вентилятор, у вас не будет никакого контроля над ним.Обратите внимание, что занесение этого модуля в черный список предотвратит работу подсветки клавиатуры.
Ниже приведены команды для управления им. Проверьте, есть ли у вас какой-либо контроль над вентилятором:
# echo 255> / sys / devices / platform / asus-nb-wmi / hwmon / hwmon [[: print:]] * / pwm1 # Полная скорость вентилятора (значение: 255) # echo 0> / sys / devices / platform / asus-nb-wmi / hwmon / hwmon [[: print:]] * / pwm1 # Вентилятор остановлен (значение: 0) # echo 2> / sys / devices / platform / asus-nb-wmi / hwmon / hwmon [[[: print:]] * / pwm1_enable # Изменить режим вентилятора на автоматический # echo 1> / sys / devices / platform / asus-nb-wmi / hwmon / hwmon [[: print:]] * / pwm1_enable # Изменить режим вентилятора на ручной
Если вы смогли изменить скорость вращения вентилятора с помощью приведенных выше команд, продолжайте с # Создать файл конфигурации с помощью pwmconfig.
asus_fan
asus_fan — это модуль ядра, который позволяет управлять обоими вентиляторами на некоторых старых ноутбуках Asus. Он не работает с самыми последними моделями.
Установите модуль ядра DKMS asus-fan-dkms-git AUR , предоставив asus_fan :
# modprobe asus_fan
Проверьте, есть ли у вас какой-либо контроль над обоими вентиляторами:
# echo 255> / sys / devices / platform / asus_fan / hwmon / hwmon [[: print:]] * / pwm1 # Полная скорость вентилятора ЦП (значение: 255) # echo 0> / sys / devices / platform / asus_fan / hwmon / hwmon [[: print:]] * / pwm1 # Вентилятор процессора остановлен (значение: 0) # echo 255> / sys / devices / platform / asus_fan / hwmon / hwmon [[: print:]] * / pwm2 # Полная скорость вентилятора GFX (значение: 255) # echo 0> / sys / devices / platform / asus_fan / hwmon / hwmon [[: print:]] * / pwm2 # Вентилятор GFX остановлен (значение: 0) # echo 2> / sys / devices / platform / asus_fan / hwmon / hwmon [[: print:]] * / pwm1_enable # Изменить режим вентилятора процессора на автоматический # echo 1> / sys / devices / platform / asus_fan / hwmon / hwmon [[: print:]] * / pwm1_enable # Изменить режим вентилятора процессора на ручной # echo 2> / sys / devices / platform / asus_fan / hwmon / hwmon [[: print:]] * / pwm2_enable # Измените режим вентилятора GFX на автоматический # echo 1> / sys / devices / platform / asus_fan / hwmon / hwmon [[: print:]] * / pwm2_enable # Изменить режим вентилятора GFX на ручной # cat / sys / devices / platform / asus_fan / hwmon / hwmon [[: print:]] * / temp1_input # Отображение температуры GFX (всегда будет 0, когда GFX отключен / не используется)
Если все работает, вы можете загрузить этот модуль ядра при загрузке:
/ etc / modules-load.
 d / asus_fan.conf
d / asus_fan.conf asus_fan
Продолжите с # Создать файл конфигурации с помощью pwmconfig.
Создать файл конфигурации с помощью pwmconfig
Если вы получаете сообщение об ошибке Нет работающих датчиков вентилятора, все показания равны 0 при создании файла конфигурации с pwmconfig , откройте первую консоль и выполните:
# watch -n 1 "echo 2> / sys / devices / platform // hwmon / hwmon [[: print:]] * / pwm 1 _enable"
Если вы используете модуль ядра asus_fan и у вас второй вентилятор, во второй консоли:
# watch -n 1 "echo 2> / sys / devices / platform // hwmon / hwmon [[: print:]] * / pwm 2 _enable"
И, наконец, в третьей консоли:
# pwmconfig
Когда вы закончите и сгенерируете файл конфигурации, вы должны остановить первую и вторую консоли.Продолжайте с Fancontrol (lm-сенсоры). После создания файла конфигурации вам может потребоваться вручную заменить значения PWM полными путями к sysfs, поскольку они используются в этих шагах, поскольку числовые значения hwmon могут измениться после перезагрузки.
После создания файла конфигурации вам может потребоваться вручную заменить значения PWM полными путями к sysfs, поскольку они используются в этих шагах, поскольку числовые значения hwmon могут измениться после перезагрузки.
Альтернативный метод с использованием регистров EC
Если вышеуказанные методы не работают для вас, альтернативным методом является прямая запись в определенные регистры встроенного контроллера (EC). Используя инструмент EC-Probe, вы можете установить один из трех режимов скорости вращения вентилятора, если ваша модель поддерживает такую функцию в Windows.
В модели ASUS FX504GD при установке скорости вращения вентилятора на один из трех режимов используются следующие значения регистров:
# ec-probe write 0x5e 0x80 # тихий режим # ec-probe write 0x5e 0x40 # режим балансировки # ec-probe write 0x5e 0xC0 # режим производительности
Здесь мы пишем в регистр 0x5e, который отвечает за установку режима скорости вентилятора.
Если эти значения не работают для вас, запустите инструмент ec-probe в режиме монитора в Windows и попытайтесь определить, какой регистр в EC изменяет значение при переключении между режимами скорости вращения вентилятора.
Режимы управления вентиляторами на некоторых ноутбуках серии TUF
На некоторых ноутбуках ASUS серии TUF производительность и режимы управления вентилятором можно изменить с помощью клавиши Fn + F5 . Текущий режим можно просмотреть, выполнив следующую команду:
$ cat / sys / устройства / платформа / asus-nb-wmi / fan_boost_mode
Вы можете увидеть изменение значения при использовании клавиши Fn + F5 . 0 — «Нормальный режим», 1 — «Режим производительности», 2 — скорее всего, «Тихий режим». [2] Также можно записать эти значения в файл fan_boost_mode как root и получить желаемый эффект.
Это было протестировано на модели ASUS TUF FX504GE и оказалось, что оно работает.
AMDGPU sysfs управление вентилятором
Драйвер ядра AMDGPU предлагает управление вентиляторами для видеокарт через hwmon в sysfs.
Конфигурация ручного управления
Чтобы переключиться на ручное управление вентилятором из автоматического, запустите
# echo "1"> / sys / class / drm / card0 / device / hwmon / hwmon0 / pwm1_enable
Установите скорость вентилятора, например, 50% (100% — это 255 циклов ШИМ, поэтому рассчитайте желаемую скорость вентилятора в процентах, умножив его значение на 2.55):
# echo "128"> / sys / class / drm / card0 / device / hwmon / hwmon0 / pwm1
Для возврата к автоматическому управлению вентилятором запустите
# echo "2"> / sys / class / drm / card0 / device / hwmon / hwmon0 / pwm1_enable
Предупреждение: Сброс скорости вращения вентилятора на автоматический может не работать из-за ошибки драйвера, и вместо этого может потребоваться перезапуск драйвера в качестве временного решения.
вентилятор amdgpu
Пакет amdgpu-fan AUR — это автоматический контроллер вентилятора для видеокарт с поддержкой AMDGPU, написанный на Python. Он использует «матрицу скорости» для согласования частоты вентиляторов с температурой графического процессора, например:
Он использует «матрицу скорости» для согласования частоты вентиляторов с температурой графического процессора, например:
speed_matrix: # - [темп (* C), скорость (0-100%)] - [0, 0] - [40, 30] - [60, 50] - [80, 100]
После установки пакета его можно запустить как службу, так что вы можете либо запустить его для текущего сеанса:
# systemctl start amdgpu-fan.service
или выполняется при загрузке
# systemctl enable amdgpu-fan.service
сценарий fancurve
Через hwmon в sysfs предлагается не только управление вентиляторами, но и считывание температуры графического процессора:
cat / sys / class / drm / card0 / device / hwmon / hwmon0 / temp1_input
Выводит температуру графического процессора в ° C + три нуля, например.грамм. 33000 для 33 ° C.
Сценарий bash amdgpu-fancontrol от grmat предлагает полностью автоматическое управление вентиляторами с использованием описанных функций sysfs hwmon. Это также позволяет удобно регулировать назначения циклов температуры / ШИМ и гистерезис кривой, предлагая абстрактные поля конфигурации в верхней части скрипта.
Это также позволяет удобно регулировать назначения циклов температуры / ШИМ и гистерезис кривой, предлагая абстрактные поля конфигурации в верхней части скрипта.
Совет: Для правильной работы скрипту необходимо как минимум три заданных назначения циклов температуры / ШИМ.
По соображениям безопасности сценарий снова устанавливает автоматическое управление вентилятором при выключении.Это может вызвать раскручивание вентиляторов, что можно обойти за счет безопасности, установив set_fanmode 1 в разделе функции reset_on_fail .
Настройка скрипта fancurve
Для запуска скрипта рекомендуется использовать систему systemd init. Таким образом, подробный вывод скрипта можно будет прочитать через journalctl / systemctl status. Для этого в репозиторий GitHub уже включен файл конфигурации .service.
Также может потребоваться перезапустить сценарий через root-resume.сервис после гибернации, чтобы он снова автоматически работал правильно:
/etc/systemd/system/root-resume.
 service
service [Единица] Описание = Действия возобновления локальной системы После = suspend.target [Служба] Тип = простой ExecStart = / usr / bin / systemctl перезапуск amdgpu-fancontrol.service [Установить] WantedBy = suspend.target
Поиск и устранение неисправностей
Увеличьте делитель вентилятора для датчиков
Если датчики не выдают данные о числе оборотов вентилятора ЦП, может потребоваться изменить делитель вентилятора.
Первая строка выходных данных датчиков — это набор микросхем, используемый материнской платой для считывания значений температуры и напряжения.
Создайте файл в /etc/sensors.d/ :
/etc/sensors.d/fan-speed-control.confМикросхема
" coretemp-isa- *" комплект вентилятора X _div 4
Замена coretemp-isa- на имя набора микросхем и X на номер вентилятора ЦП, который нужно изменить.
Сохраните файл и запустите как root:
# датчики -s
, который перезагрузит файлы конфигурации.
Снова запустите датчиков и проверьте, есть ли показания оборотов. Если нет, увеличьте делитель до 8, 16 или 32. YMMV!
Пути устройств изменены в / etc / fancontrol
Перечисленные символические ссылки hwmon, расположенные в / sys / class / hwmon /, могут изменяться по порядку, поскольку модули ядра не загружаются в согласованном порядке при загрузке. По этой причине управление вентилятором может работать некорректно. Ошибка: «Конфигурация устарела, запустите pwmconfig еще раз».Ошибка апстрима.
Решение
В /etc/conf.d/lm_sensors есть 2 массива, в которых перечислены все модули, обнаруженные при выполнении Sensor-detect . Они загружаются с помощью fancontrol. Если файл не существует, запустите Sensor-detect как root, принимая значения по умолчанию. Откройте (или создайте) /etc/modules-load.d/modules.conf . Получите все модули, перечисленные из 2 переменных в /etc/conf. и поместите их в 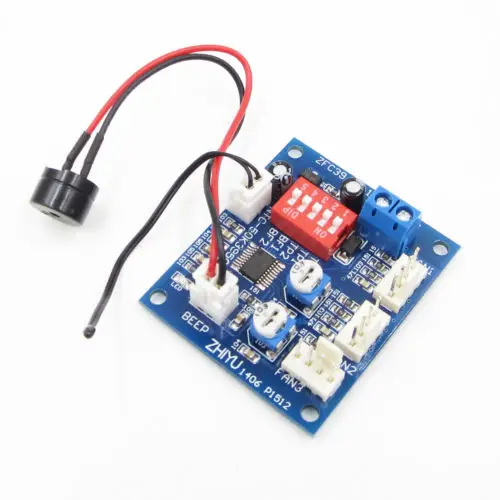 d/lm_sensors/
d/lm_sensors/ / etc / modules-load.d / modules.conf , по одному модулю на строку. Указание их таким образом должно привести к определенному порядку загрузки модулей, что должно заставить пути hwmon оставаться там, где они есть, а не менять порядок при каждой загрузке. Если это не сработает, я настоятельно рекомендую найти другую программу для управления своими поклонниками. Если вы не можете найти ни одного, вы можете попробовать использовать альтернативное решение, указанное ниже.
Альтернативное решение: абсолютные пути
Использование абсолютных путей к файлам в fancontrol по умолчанию не работает, так как его вспомогательный сценарий pwmconfig запрограммирован на использование только путей hwmon для получения файлов.Это делается так, что он определяет, не изменился ли путь hwmon, указанный в его файле конфигурации / etc / fancontrol , и использует переменные DEVNAME и DEVPATH для определения такого изменения.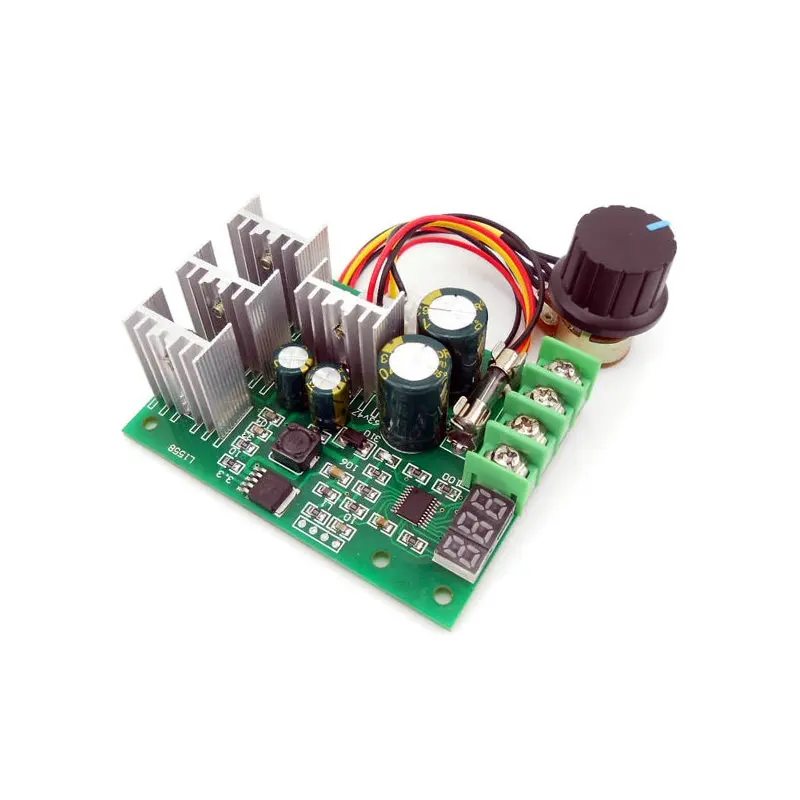 Если ваши пути к hwmon будут постоянно меняться, это предотвратит запуск fancontrol, что бы вы ни делали. Однако эту проблему можно обойти. Откройте
Если ваши пути к hwmon будут постоянно меняться, это предотвратит запуск fancontrol, что бы вы ни делали. Однако эту проблему можно обойти. Откройте / usr / bin / fancontrol и закомментируйте эту часть скрипта:
если! ValidateDevices "$ DEVPATH" "$ DEVNAME"
тогда
echo "Конфигурация устарела, запустите pwmconfig еще раз"> & 2
выход 1
фи
Примечание: Это может заставить fancontrol записывать в файлы, которые вы указали в файле конфигурации, независимо от того, что это за файл.Это может повредить файлы, если вы укажете неправильный путь. Убедитесь, что вы используете правильный путь для своих файлов. Также следует отметить, что при выполнении этого обходного пути использование pwmconfig для повторного создания сценария перезапишет все ваши абсолютные пути, которые вы настроили. Поэтому лучше вручную изменить старые пути на новые, если это необходимо, вместо использования pwmconfig.
Комментирование этого должно эффективно игнорировать проверки правильности hwmon.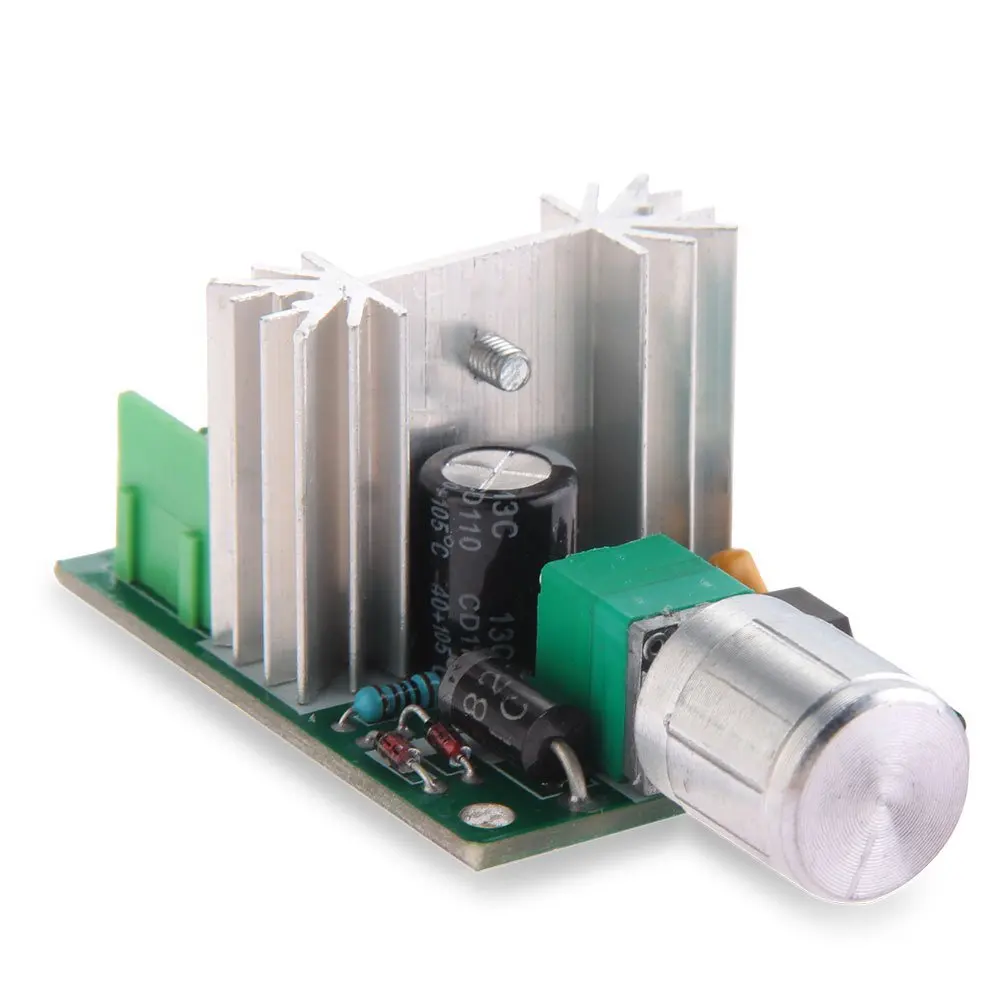 Вы также можете игнорировать переменные
Вы также можете игнорировать переменные DEVNAME и DEVPATH в файле конфигурации. После этого замените все пути hwmon в других переменных на его абсолютный путь. Чтобы упростить задачу, повторно запустите pwmconfig , чтобы обновить устройства hwmon. Теперь пути hwmon в файле конфигурации должны указывать на правильные абсолютные пути. Для каждого пути hwmon выполните следующую команду:
"#" - это нумерация пути hwmon $ readlink -f / sys / class / hwmon / hwmon # / устройство
Это даст вам абсолютный путь к устройству.
Например, в файле / etc / fancontrol FCTEMPS отображается следующим образом:
FCTEMPS = hwmon2 / pwm1 = hwmon3 / temp1_input
Выполнение readlink -f / sys / class / hwmon / hwmon3 / device может, например, вывести /sys/devices/platform/coretemp.0/ . cd в этот каталог. Если вы видите каталог / hwmon / hwmon # / , вы должны сделать это в своем файле конфигурации fancontrol, чтобы заменить путь hwmon #.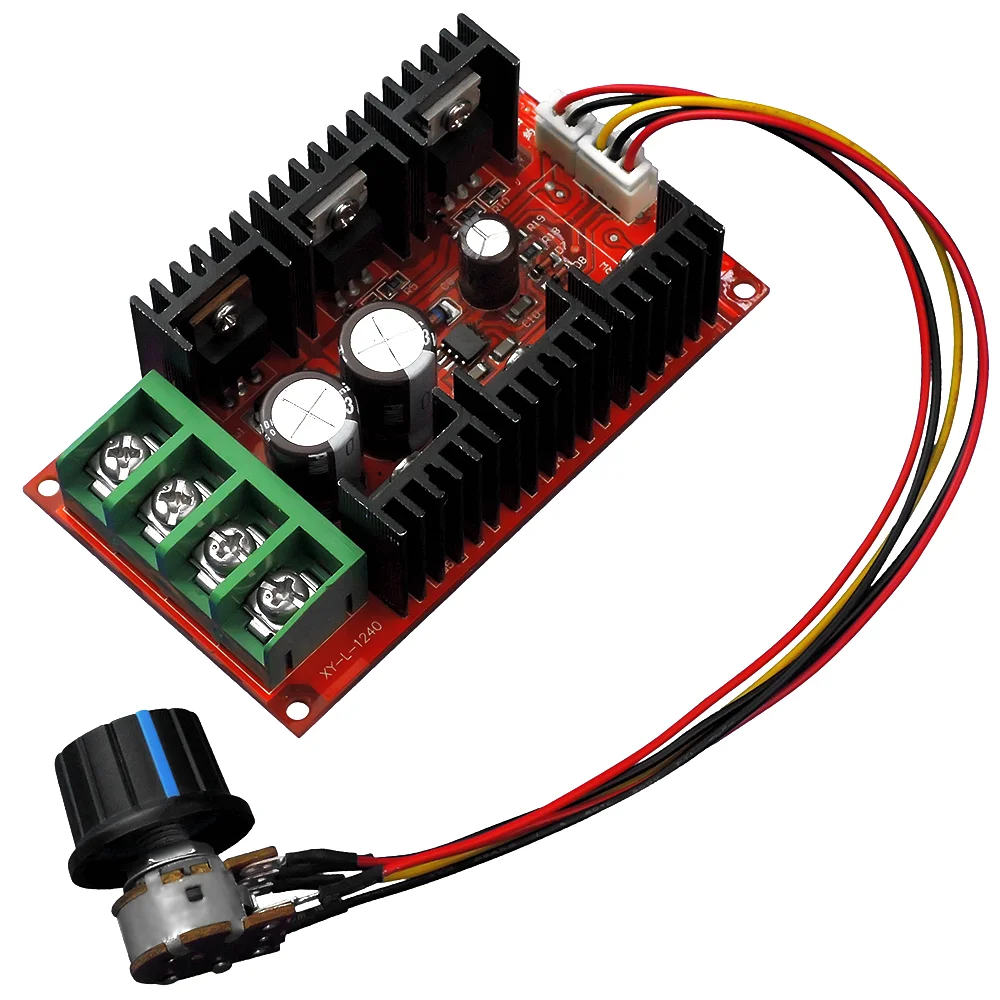 Из предыдущего примера:
Из предыдущего примера:
# ПЕРЕД FCTEMPS = hwmon2 / pwm1 = hwmon3 / temp1_input # ПОСЛЕ FCTEMPS = hwmon2 / pwm1 = / sys / devices / platform / coretemp.0 / hwmon / [[: print:]] * / temp1_input
По сути, вы должны заменить путь hwmon на абсолютный путь, объединенный с {{ic | / hwmon / [[: print:]] * /}, чтобы bash мог поймать случайное перечисленное имя hwmon.
Если вы не видите каталог / hwmon / hwmon # / , то вам не о чем беспокоиться. Это означает, что файлы температуры находятся в корне папки устройства. Просто замените hwmon # / на абсолютный путь к файлу. Например:
#BEFORE FCTEMPS = hwmon2 / pwm1 = hwmon3 / temp1_input #ПОСЛЕ FCTEMPS = hwmon2 / pwm1 = / sys / devices / platform / coretemp.0 / temp1_input
После замены всех путей fancontrol должен работать нормально.
ШИМ-контроллеры
Мы видели, как многие люди упоминали, что у них есть контроллеры вентиляторов с ШИМ, и что они планируют использовать их для управления скоростью наших насосов, совместимых с ШИМ. В этом есть потенциальная проблема, которая требует следующего пояснения. Проблема, по сути, возникает из-за запутанного соглашения об именах различных контроллеров вентиляторов.
В этом есть потенциальная проблема, которая требует следующего пояснения. Проблема, по сути, возникает из-за запутанного соглашения об именах различных контроллеров вентиляторов.
Наличие так называемого ШИМ-регулятора скорости не означает, что вы сможете управлять нашим насосом.На сайте overclockers.com есть отличная справочная статья, написанная Дэйвом, в которой объясняется, как работает ШИМ.
Выдержка из статьи:
Есть ШИМ-контроллеры и есть ШИМ-вентиляторы, но способ реализации ШИМ в каждом из них сильно отличается: стандартный ШИМ-контроллер модулирует линию питания 12 В «обычного» двигателя 12 В постоянного тока. Напротив, ШИМ-контроллер для вентиляторов с ШИМ — такой, как тот, что представлен в этой статье — не модулирует линию питания 12 В, а вместо этого отправляет сигнал ШИМ по другой линии питания (волшебный «четвертый провод») в более продвинутый Двигатель 12 В постоянного тока, оставляя линию питания 12 В непрерывной.Специальные вентиляторы PWM не только имеют внутреннюю схему, которая отличается от стандартных вентиляторов, но и потому, что они разработаны с учетом контроля скорости, сами двигатели обычно более продвинуты (и дороги). Итак, ШИМ-регулирование скорости стандартного вентилятора действительно сильно отличается от ШИМ-управления скоростью ШИМ-вентилятора… Nidec даже заходит так далеко, что заявляет, что модуляция основного напряжения питания не рекомендуется:
Итак, ШИМ-регулирование скорости стандартного вентилятора действительно сильно отличается от ШИМ-управления скоростью ШИМ-вентилятора… Nidec даже заходит так далеко, что заявляет, что модуляция основного напряжения питания не рекомендуется:
Широтно-импульсная модуляция рабочего напряжения постоянного тока для изменения скорости вращения вентилятора [редактировать: в устройствах с ШИМ] не рекомендуется.Переходные процессы, возникающие при таком подходе, могут необратимо повредить коммутационную и управляющую электронику двигателя и значительно сократить срок службы вентилятора.
Конец отрывка.
Как мы видим выше, критически важно различать контроллеры вентиляторов с ШИМ, предназначенные для управления обычным 3-контактным вентилятором, и контроллеры вентиляторов с ШИМ, специально разработанные для управления 4-контактными вентиляторами с ШИМ. В первом типе линия питания 12 В модулируется контроллером вентилятора, а во втором типе контроллер отправляет сигнал через провод 4 -й на вентилятор, и двигатель вентилятора модулирует свою скорость в соответствии с этим сигналом, используя свой бортовой контроллер.
Выше важно понимать, что вентиляторы с ШИМ и насос Swiftech с ШИМ рассчитаны на постоянное питание 12 В. Хотя напряжение может несколько изменяться, диапазон обычно ограничен; мы опубликуем безопасный рабочий диапазон для нашего насоса после выпуска.
Следовательно, наличие ШИМ-контроллеров вентиляторов не обязательно означает, что вы сможете управлять нашим насосом. Сначала вам нужно убедиться, что ваш контроллер предназначен для управления 4-контактными устройствами PWM.
Давайте рассмотрим несколько примеров и перейдем к Frozen CPU, чтобы ознакомиться с некоторыми из доступных контроллеров вентиляторов PWM:
Ключевое слово выше — 3-контактный.Этот контроллер может использовать ШИМ-сигнал материнской платы для управления вентиляторами, но он по-прежнему управляет ими посредством модуляции напряжения, поэтому для нашего насоса это не сработает.
Статус: не совместим
Sunbeam 30W Rheosmart 3 Channel Smart Fan Controller — черный (PL-RS-3)
Статус: не совместим
6-канальный контроллер Smart Fan Sunbeam 30W Rheosmart — черный (PL-RS-6)
Статус: не совместим
Zalman PWM Mate — автоматический / ручной контроллер вентилятора PWM — черный
Статус: совместимо, не проверено
Zalman ZM-MFC1 Combo 5-канальный PWM / 3-контактный контроллер вентилятора — черный
Статус: ожидает проверки
Zalman ZM-MFC3 Многоканальный регулятор скорости / монитор температуры
Статус: Совместимо, подтверждено, как показано ниже:
Насос мин = 1500 об / мин макс = 3000 об / мин
Вентиляторы Helix PWM мин. = 1120 об / мин макс. = 1800 об / мин
= 1120 об / мин макс. = 1800 об / мин
% PDF-1.3
%
1183 0 объект
>
endobj
xref
1183 135
0000000016 00000 н.
0000003075 00000 н.
0000003302 00000 п.
0000003445 00000 н.
0000003478 00000 н.
0000003537 00000 н.
0000004674 00000 н.
0000005206 00000 н.
0000005275 00000 н.
0000005439 00000 п.
0000005598 00000 н.
0000005771 00000 п.
0000005891 00000 н.
0000005995 00000 н.
0000006159 00000 н.
0000006327 00000 н.
0000006457 00000 н.
0000006632 00000 н.
0000006819 00000 н.
0000006945 00000 н.
0000007077 00000 н.
0000007179 00000 н.
0000007366 00000 н.
0000007556 00000 н.
0000007689 00000 н.
0000007822 00000 н.
0000007982 00000 п.
0000008141 00000 п.
0000008279 00000 н.
0000008394 00000 н.
0000008518 00000 н.
0000008651 00000 п.
0000008821 00000 н.
0000009000 00000 н.
0000009098 00000 н.
0000009214 00000 п.
0000009387 00000 п.
0000009489 00000 н.
0000009636 00000 н.
0000009762 00000 н. 0000009884 00000 н.
0000010054 00000 п.
0000010150 00000 п.
0000010299 00000 п.
0000010443 00000 п.
0000010550 00000 п.
0000010686 00000 п.
0000010811 00000 п.
0000010933 00000 п.
0000011052 00000 п.
0000011170 00000 п.
0000011300 00000 п.
0000011431 00000 п.
0000011562 00000 п.
0000011683 00000 п.
0000011812 00000 п.
0000011939 00000 п.
0000012066 00000 п.
0000012168 00000 п.
0000012268 00000 п.
0000012369 00000 п.
0000012466 00000 п.
0000012564 00000 п.
0000012662 00000 п.
0000012760 00000 п.
0000012858 00000 п.
0000012956 00000 п.
0000013054 00000 п.
0000013152 00000 п.
0000013250 00000 п.
0000013348 00000 п.
0000013446 00000 п.
0000013545 00000 п.
0000013644 00000 п.
0000013743 00000 п.
0000013842 00000 п.
0000013941 00000 п.
0000014040 00000 п.
0000014139 00000 п.
0000014238 00000 п.
0000014337 00000 п.
0000014436 00000 п.
0000014535 00000 п.
0000014635 00000 п.
0000014734 00000 п.
0000014833 00000 п.
0000014932 00000 п.
0000015032 00000 п.
0000009884 00000 н.
0000010054 00000 п.
0000010150 00000 п.
0000010299 00000 п.
0000010443 00000 п.
0000010550 00000 п.
0000010686 00000 п.
0000010811 00000 п.
0000010933 00000 п.
0000011052 00000 п.
0000011170 00000 п.
0000011300 00000 п.
0000011431 00000 п.
0000011562 00000 п.
0000011683 00000 п.
0000011812 00000 п.
0000011939 00000 п.
0000012066 00000 п.
0000012168 00000 п.
0000012268 00000 п.
0000012369 00000 п.
0000012466 00000 п.
0000012564 00000 п.
0000012662 00000 п.
0000012760 00000 п.
0000012858 00000 п.
0000012956 00000 п.
0000013054 00000 п.
0000013152 00000 п.
0000013250 00000 п.
0000013348 00000 п.
0000013446 00000 п.
0000013545 00000 п.
0000013644 00000 п.
0000013743 00000 п.
0000013842 00000 п.
0000013941 00000 п.
0000014040 00000 п.
0000014139 00000 п.
0000014238 00000 п.
0000014337 00000 п.
0000014436 00000 п.
0000014535 00000 п.
0000014635 00000 п.
0000014734 00000 п.
0000014833 00000 п.
0000014932 00000 п.
0000015032 00000 п. 0000015793 00000 п.
0000015836 00000 п.
0000016025 00000 п.
0000016603 00000 п.
0000016835 00000 п.
0000017048 00000 п.
0000017164 00000 п.
0000017369 00000 п.
0000017744 00000 п.
0000017775 00000 п.
0000018001 00000 п.
0000018024 00000 п.
0000018820 00000 п.
0000018843 00000 п.
0000019581 00000 п.
0000019604 00000 п.
0000020371 00000 п.
0000020394 00000 п.
0000021193 00000 п.
0000021216 00000 п.
0000021874 00000 п.
0000022304 00000 п.
0000022777 00000 п.
0000023352 00000 п.
0000024107 00000 п.
0000024130 00000 п.
0000024356 00000 п.
0000024868 00000 п.
0000025625 00000 п.
0000025648 00000 п.
0000026205 00000 п.
0000026228 00000 п.
0000027790 00000 н.
0000056048 00000 п.
0000056128 00000 п.
0000058808 00000 п.
0000082253 00000 п.
0000102602 00000 п.
0000105959 00000 н.
0000110894 00000 н.
0000111102 00000 п.
0000111673 00000 н.
0000111752 00000 н.
0000111832 00000 н.
0000111911 00000 н.
0000003580 00000 н.
0000004651 00000 п.
трейлер
]
>>
startxref
0
%% EOF
1184 0 объект
>
endobj
1185 0 объект
a_
0000015793 00000 п.
0000015836 00000 п.
0000016025 00000 п.
0000016603 00000 п.
0000016835 00000 п.
0000017048 00000 п.
0000017164 00000 п.
0000017369 00000 п.
0000017744 00000 п.
0000017775 00000 п.
0000018001 00000 п.
0000018024 00000 п.
0000018820 00000 п.
0000018843 00000 п.
0000019581 00000 п.
0000019604 00000 п.
0000020371 00000 п.
0000020394 00000 п.
0000021193 00000 п.
0000021216 00000 п.
0000021874 00000 п.
0000022304 00000 п.
0000022777 00000 п.
0000023352 00000 п.
0000024107 00000 п.
0000024130 00000 п.
0000024356 00000 п.
0000024868 00000 п.
0000025625 00000 п.
0000025648 00000 п.
0000026205 00000 п.
0000026228 00000 п.
0000027790 00000 н.
0000056048 00000 п.
0000056128 00000 п.
0000058808 00000 п.
0000082253 00000 п.
0000102602 00000 п.
0000105959 00000 н.
0000110894 00000 н.
0000111102 00000 п.
0000111673 00000 н.
0000111752 00000 н.
0000111832 00000 н.
0000111911 00000 н.
0000003580 00000 н.
0000004651 00000 п.
трейлер
]
>>
startxref
0
%% EOF
1184 0 объект
>
endobj
1185 0 объект
a_
ШИМ-вентилятор против вентиляторов постоянного тока: что лучше?
Компьютерные вентиляторы — важный компонент каждого компьютера. Такие компоненты, как ЦП, графический процессор и блок питания, требуют электричества для работы, а электричество выделяет тепло.
Такие компоненты, как ЦП, графический процессор и блок питания, требуют электричества для работы, а электричество выделяет тепло.
Вентиляторы используются как для всасывания, так и для вывода нагретого воздуха. Без них вышеупомянутые компоненты могут испытывать тепловое дросселирование или даже повреждение.
В то время как раньше было достаточно пассивных компонентов, таких как радиаторы и тепловые трубки, для большинства современных компьютеров это редко.
Описание вентиляторов с ШИМ и постоянным током
В компьютерах используются два основных типа вентиляторов.Их называют PWM (широтно-импульсная модуляция) и DC (постоянный ток). Оба этих вентилятора имеют свое собственное применение, однако важно понимать, как они работают и когда их использовать.
Что такое вентилятор с ШИМ?
Аббревиатура ШИМ происходит от электротехники и означает широтно-импульсную модуляцию или модуляцию длительности импульса. По сути, ШИМ позволяет вашей материнской плате контролировать число оборотов вентилятора в минуту или число оборотов в минуту в зависимости от воспринимаемой температуры различных компонентов компьютера.
Вентиляторы постоянного тока бывают 3-контактными / 3-проводными и имеют сигналы питания, заземления и тахометрические сигналы. При этом вентиляторы PWM бывают 4-контактными / 4-проводными, а 4-й провод предназначен для PWM.
Чтобы использовать вентилятор с ШИМ, на вашей материнской плате необходим разъем ШИМ, а также программное обеспечение для интерпретации цифрового сигнала. Большинство новых материнских плат имеют как минимум один 4-контактный разъем PWM.
Вентилятор с ШИМ-управлением работает, по сути, путем очень быстрого включения и выключения вентилятора. В низкочастотном ШИМ это переключение создает некоторый коммутационный шум.Однако большинство вентиляторов с ШИМ работают на частоте 22,5 кГц, что не слышно. Воспринимаемый выходной сигнал затем изменяется путем изменения рабочего цикла.
Рабочий цикл измеряет, как долго сигнал остается включенным по сравнению с выключенным. Например, рабочий цикл 50% означает, что вентилятор включен половину времени и выключен вторую половину. Напротив, 100% рабочий цикл означает, что вентилятор всегда включен.
Напротив, 100% рабочий цикл означает, что вентилятор всегда включен.
ШИМ-вентиляторы полезны, поскольку они минимизируют уровень шума и более энергоэффективны, чем вентиляторы постоянного тока. Благодаря своему принципу работы подшипники вентилятора с ШИМ служат намного дольше.
Что такое вентилятор постоянного тока?
Вентиляторы постоянного или постоянного тока — это компьютерные вентиляторы, которые работают от фиксированного значения напряжения. Стандартные значения напряжения — 5 В, 12 В, 24 В и 48 В. Манипулируя этими значениями напряжения, вы можете эффективно изменять их скорость или частоту вращения.
Для иллюстрации, большинство вентиляторов постоянного тока рассчитаны на 12 В. Однако, если вы отправите им 7 В, вы получите примерно 60% от потенциальной скорости. Это также означает, что диапазон скоростей не такой точный, и любая неиспользованная мощность по существу тратится в виде тепла.Возможность контролировать значение напряжения вентиляторов постоянного тока встречается нечасто.
Примечание: Если вы снизите напряжение достаточно, вы можете даже заглохнуть вентилятор, поскольку у него недостаточно энергии для вращения ротора. У большинства вентиляторов на 12 В минимальное значение напряжения составляет 6-7 В, прежде чем он заглохнет.
Как упоминалось выше, вентиляторы постоянного тока обычно трехпроводные и имеют выход питания, заземления и тахометрический или тахометрический выход. Тахометр выдает сигнал, связанный со скоростью или числом оборотов в минуту (RPM).
Большинство вентиляторов постоянного тока не имеют возможности управления скоростью (постоянно работают со 100% скоростью / напряжением) или имеют термостатический (вкл. / Выкл.) Переключатель.
Как и следовало ожидать, вентиляторы постоянного тока обычно громче, чем вентиляторы с ШИМ, поскольку они вращаются на максимальных оборотах, независимо от воспринимаемой температуры.
Воздушный поток в зависимости от статического давления
Как воздушный поток, так и статическое давление являются важными показателями, которые используются для оценки общей производительности вентилятора.
Метрики воздушного потока обычно измеряются в кубических футах в минуту или кубических футах в минуту. При этом давление указано в мм вод. Ст. Воздушный поток помогает проиллюстрировать, сколько воздуха может перемещать вентилятор, в то время как статическое давление описывает давление перемещаемого воздуха.
Воздух — очень плохой проводник тепла. Как мы уже отмечали выше, без вентиляторов ваш компьютер будет испытывать снижение температуры из-за перегрева. Лопасти вентилятора создают механический воздушный поток и помогают отводить теплый воздух и всасывать холодный.
Вентиляторы статического давления обычно используются в радиаторах (ЦП) и кулерах графического процессора (ГП). В основном это области, где поток воздуха может быть заблокирован каким-либо предметом. Эти вентиляторы обычно имеют более высокое значение CFM для компенсации.
Важно помнить, что, регулируя скорость вращения вентилятора, вы также влияете на объем воздуха, давление, энергопотребление и уровни шума или «законы сродства вентилятора» или «законы насоса». ”
”
Заключение
Вентилятор постоянного тока требует минимального значения напряжения для непрерывного вращения. Большинство производителей вентиляторов постоянного тока указывают это значение, чтобы вы не остановили вентилятор. В то время как тот же вентилятор, использующий ШИМ-контроллер, мог вращаться на гораздо более низких оборотах (напряжении), не останавливая вентилятор.
Как и следовало ожидать, основным преимуществом ШИМ является общий выходной шум. Как мы отметили выше, большинство переключений не слышно из-за работы за пределами диапазона частот, который может воспринимать человек.
Это также означает, что ШИМ более эффективен, чем постоянный ток, поскольку он использует только энергию, необходимую для охлаждения системы и рассеивания тепла. В то время как вентилятор постоянного тока будет вращаться при фиксированном напряжении или оборотах независимо от тепловой мощности.
Ваш выбор между вентиляторами постоянного тока или ШИМ более или менее определяется вашей материнской платой.